您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 质量控制/管理 > 基于滑跌的下肢步态调节
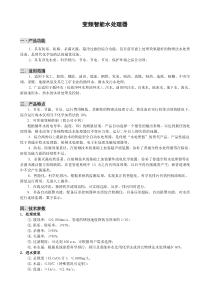
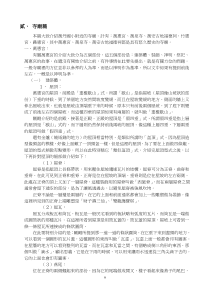
——基于滑跌的下肢步态调节控制设计一拟选课题背景及其研究意义:近年来,下肢的运动在军事上,医学上及人们日常生活中的用途日益受关注。20世纪机器人技术的发展,为机器人参与医学康复提供了可能,同时也为提高军事自动化提供了可能。尤其近年来,随着传统机械学、传感技术、智能控制技术、计算机技术及其其他新兴技术的迅速发展,给军事、医学及人们日常生活中带来了高速发展的契机。通过对穿戴动力式助行器的试验者在各种行走条件下的行走稳定性试验和步态调节分析,构建滑跌事故预测模型,并且在即将摔倒时要使助行器自动调节步态,由此使试验者不用摔倒。使动力式助行器能够更符合正常人的行走机理,为实现真正意义上的步行功能代偿奠定坚实的理论基础。该研究为老年人的生活料理及残疾人康复医疗事业、居住环境无障碍设计、和机器人设计等领域的研究提供理论基础和技术支撑二本课题研究领域在国内外的研究动态及发展趋势:。目前课题组对人体行走稳定性机理和行走滑跌机制有了初步研究,提出了新的滑跌判定条件,完成了怀恩概率预测的模型的建立,并以此为基础进行了助行器的设计及其稳定性的研究。但是目前只考虑了外界因素(鞋底材质、地面材质、污染介质)对滑跌概率的影响,对生物力学模型,开展这方面的研究室必不可少的。但是国内外几乎没有关于在这么多的外界条件下进行防滑,并且国内外的大部分都是半闭环控制的。三拟采取研究方法和主要问题:1、研究方法:1)查阅资料和学习软件主要查外文资料,借鉴别人的一些经验和方法,防止走一些弯路;并且学习一些需要的软件,例如编程软件和仿真软件。2)行走稳定性实验通过试验者穿戴防滑助行器来模拟各种行走条件,然后测量力、速度和加速度等对滑跌的权重,最终在程序中要使用。3)建立临界条件通过实验来确定几种典型的鞋底材质、地表材质及路况条件、转弯半径和负重的临界条件。并且使用实验装置和软件来拟合出各种条件下的临界曲线。4)反馈调节采用传感器(压力、速度和加速度等)把一些物理量转化为电信号,然后传输给单片机然后通过程序上进行步态调节。4)仿真检验通过仿真软件proteus或者MATLAB来检验它的可行性。流程图:电机传感器仿真软件2、主要技术问题:1)动力式助行器的预测与多种相关因素有关,首先是怎么在这些相关因素(例如材料、转弯半径、负重等)下建立运动学模型是滑跌事故下肢步态预测模型首先要解决的重要问题。2)对传感器、电机、单片机等硬件的选择和软件的学习,也是建立滑跌的下肢步态调节的关键问题之一、3)从穿戴动力式助行器的试验者行走步态特征中提取时间、空间、动力学、运动学等参数,分析人体行走过程中的胯关节、膝关节、踝关节的运动轨迹变化特征以及关节受力点和肌肉力矩然从而使得在程序中进行防滑的步态调节谢谢!
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 niuchen190
niuchen190
本文标题:基于滑跌的下肢步态调节
链接地址:https://www.777doc.com/doc-2575790 .html