您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 酒店餐饮 > 单级倒立摆稳定控制实验
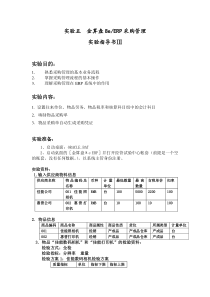
单级倒立摆稳定控制实验一.实验目的1.了解单级倒立摆的原理与数学模型的建立;2.掌握LQR控制器的设计方法;3.掌握基于LQR控制器的单级倒立摆稳定控制系统的仿真方法。二.实验内容图1一级倒立摆原理图一级倒立摆系统的原理框图如上所示。系统包括计算机、运动控制卡、伺服机构、倒立摆本体和光电码盘几大部分,组成了一个闭环系统。光电码盘1将连杆的角度、角速度信号反馈给伺服驱动器和运动控制卡,摆杆的角度、角速度信号由光电码盘2反馈回控制卡。计算机从运动控制卡中读取实时数据,确定控制决策,并由运动控制卡来实现该控制决策,产生相应的控制量,驱动电机转动,带动连杆运动,保持摆杆的平衡。在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图2所示。图2直线一级倒立摆系统其中:M小车质量m摆杆质量b小车摩擦系数l摆杆转动轴心到杆质心的长度I摆杆惯量F加在小车上的力x小车位置φ摆杆与垂直向上方向的夹角θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)下图是系统中小车和摆杆的受力分析图。其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。图3(a)小车隔离受力图;(b)摆杆隔离受力图分析小车水平方向所受的合力,可以得到以下方程:MxFbxN(1)由摆杆水平方向的受力进行分析可以得到下面等式:22sindNmxldt(2)即:2cossinNmxmlml为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:22cosdPmgmldt(3)即:2sincosPmgmlml力矩平衡方程如下:sincosPlNlI(4)注意:此方程中力矩的方向,由于,coscos,sinsin故等式前面有负号。合并这两个方程,约去P和N,得到第二个运动方程:2sincosImlmglmlx(5)设(是摆杆与垂直向上方向之间的夹角),假设与1(单位为弧度)相比很小,即1,则可以进行近似处理:cos1,sin,20ddt,用来u代表被控对象的输入力F,线性化后两个运动方程如下:2ImlmglmlxMmxbxmlu(6)系统状态空间方程为:XAXBuyCXDu(7)即:222222222201000000001000ImlbImlxxmglxxIMmMmlIMmMmlIMmMmlumglMmmlmlbIMmMmlIMmMmlIMmMml1000000100xxxyu(8)2.倒立摆系统LQR控制器设计与仿真最优控制理论主要是依据庞德里亚金的极值原理,通过对性能指标的优化寻找可以使目标极小的控制器。其中线性二次型性能指标因为可以通过求解Riccatti方程得到控制器参数,并且随着计算机技术的进步,求解过程变得越来越简便,因而在线性多变量系统的控制器设计中应用较广。利用线性二次型性能指标设计的控制器称作LQR控制器。前面我们已经得到了直线一级倒立摆系统的比较精确的动力学模型,下面我们针对直线型一级倒立摆系统应用LQR法设计与调节控制器,控制摆杆保持倒立平衡的同时,跟踪小车的位置。实际系统的模型参数如下:M小车质量1.096Kgm摆杆质量0.109Kgb小车摩擦系数0.1N/m/secl摆杆转动轴心到杆质心的长度0.25mI摆杆惯量0.0034kg*m*mT采样频率0.005秒注意:在进行实际系统的MATLAB仿真时,请将采样频率改为实际系统的采样频率。请用户自行检查系统参数是否与实际系统相符,否则请改用实际参数进行实验。由倒立摆系统状态方程:0100000.18182.672701.181820001000.454531.181804.5455xxxxu1000000100xxxyu(9)应用线性反馈控制器,控制系统结构如图4。图中,R是施加在小车上的阶跃输入,四个状态量x,x,,分别代表小车位移、小车速度、摆杆位置和摆杆角速度,输出Tyx包括小车位摆杆角度。设计控制器使得当给系统施加一个阶跃输入时,摆杆会置和摆动,然后仍然回到垂直位置,小车可以到达新的指定位置。系统的开环极点可以用Matlab程序求出。开环极点为0,-0.1428,5.5651,-5.6041,可以看出,有一个极点5.5651位于右半S平面,这说明开环系统不稳定。假设全状态反馈可以实现(四个状态量都可测),找出确定反馈控制规律K。。用Matlab中的lqr函数,可以得到最优控制器对应的K。lqr函数允许选择两个参数(R和Q),这两个参数用来平衡输入量和状态量。最简单的情况是假设R=1,*QCC.当然,也可以通过改变Q矩阵中的非调节控制器以得到期望的响应。图4控制系统结构三.实验代码A=[0100;0-0.18182.67270;0001;0-0.454531.18180];B=[0;1.18182;0;4.5455];C=[1000;0010];D=[0;0];Q=[1000;0000;0010;0000];R=2;x0=[2;0;-3;0];K=lqr(A,B,Q,R);csys=ss(A-B*K,B,[],[]);[y,t,x]=initial(csys,x0);Plot(t,x)四.实验数据与处理由图可知,系统超调量不大,但上升时间与调节时间偏大。调节Q11和Q33(实际上是增大两个参数)可以改善系统的稳定性与动态特性,使得超调量进一步减小,调节时间与稳定时间也减小。限于实验时间的不足,此处不再列举进一步优化结果。五.实验小结本次实验建立了单级倒立摆稳定控制系统,利用LQR控制器优化控制结果。再利用MATLAB进行仿真,得到了单级倒立摆的各状态量的阶跃响应曲线,再根据阶跃响应曲线对LQR控制器的控制参数进行修改从而优化了系统控制效果,基本满足了实验的目的。囿于学识,实验过程较为简陋,存在诸多缺陷。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

![浙江建筑企业大全[1]](/doc-198800.png)







 aisibaishi
aisibaishi
本文标题:单级倒立摆稳定控制实验
链接地址:https://www.777doc.com/doc-2594959 .html