您好,欢迎访问三七文档
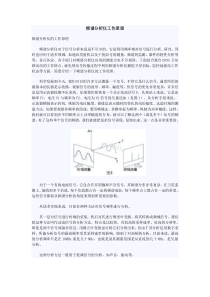
第四讲图象的半影调和抖动技术phoenix的Photoshop-1-第四讲图象的半影调和抖动技术在介绍本讲内容之前,先提出一个问题?普通的黑白针式打印机能打出灰度图来吗?如果说能,从针式打印机的打印原理来分析,似乎是不可能的。因为针打是靠撞针击打色带在纸上形成黑点的,不可能打出灰色的点来;如果说不能,可是我们的确见过用针式打印机打印出来的灰色图象。到底是怎么回事呢?你再仔细看看那些打印出来的所谓的灰色图象,最好用放大镜看。你会发现,原来这些灰色图象都是由一些黑点组成的,黑点多一些,图象就暗一些;黑点少一些,图案就亮一些。下面这几张图就能说明这一点。图1.用黑白两种颜色打印出灰度效果图中最左边的是原图,是一幅真正的灰度图,另外三张图都是黑白二值图。容易看出,最左的那幅和原图最接近。由二值图象显示出灰度效果的方法,就是我们今天要讲的半影调(halftone)技术,它的一个主要用途就是在只有二值输出的打印机上打印图象。我们介绍两种方法:图案法和抖动法。1.图案法(patterning)图案法是指灰度可以用一定比例的黑白点组成的区域表示,从而达到整体图象的灰度感。黑白点的位置选择称为图案化(patterning)。在具体介绍图案法之前,先介绍一下分辨率的概念。计算机显示器,打印机,扫描仪等设备的一个重要指标就是分辨率,单位是dpi(dotperinch),即每英寸点数,点数越多,分辨率就越高,图象就越清晰。让我们来计算一下,计算机显示器的分辨率有多高。设显示器为15英寸(指对角线长度),最多显示1280*1024个点。因为宽高比为4:3,则宽有12英寸,高有9英寸,则该显示器的水平分辨率为106dpi,垂直分辨率为113.8dpi。一般的激光打印机的分辨率有300dpi*300dpi的,有600dpi*600dpi的,720dpi*720dpi。所以打出来的图象要比计算机显示出来的清晰的多。扫描仪的分辨率要高一些,数码相机的分辨率更高。言归正传,前面讲了,图案化使用图案来表示像素的灰度,那么我们来做一道计算题。假设有一幅240*180*8bit的灰度图,当用分辨率为300dpi*300dpi的激光打印机将其打印到12.8*9.6英寸的纸上时,每个像素的图案有多大?这道题很简单,这张纸最多可以打(300*12.8)*(300*9.6)=3840*2880个点,所以每个像素可以用(3840/240)*(2880/180)=16*16个点大小的图案来表示,即一个像素256个点。如果这16*16的方块中一个黑点也没有,就可以表示灰度256,有一个黑点,就表示灰度255,依次类推,当都是黑点时,表示灰度0,这样,16*16的方块可以表示257级灰度。比要求的8bit共256级灰度还多了一个,所以上面的那幅图的灰度级别完全能够打印出来。这里有一个图案构成的问题,即黑点打在哪里?比如说,只有一个黑点时,我们可以打在正中央,也可以打16*16的左上角。图案可以是规则的,也可以是不规则的。一般情况下,有规则的图案比随即图案能够避免点的丛集,但有时会导致图象中有明显的线条。如图1中,2*2的图案可以表示5级灰度,当图象中有一片灰度为的1的区域时,如图2所示,有明显的水平和垂直线条。第四讲图象的半影调和抖动技术phoenix的Photoshop-2-图2.2*2的图案图3.规则图案导致线条如果想存储256级灰度的图案,就需要256*16*16的二值点阵,占用的空间还是相当可观的。有一个更好的办法是:只存储一个整数矩阵,称为标准图案,其中的每个值从0到255。图象的实际灰度和阵列中的每个值比较,当该值大于等于灰度时,对应点打一黑点。下面举一个25级灰度的例子加以说明。图4.标准图案举例图4中,左边为标准图案,右边为灰度为15的图案,共有10个黑点,15个白点。其实道理很简单,灰度为0时全是黑点,灰度每增加1,减少一个黑点。要注意的是,5*5的图案可以表示26种灰度,灰度25才是全白点,而不是24。下面介绍一种设计标准图案的算法,是由Limb在1969年提出的。以一个2*2的矩阵开始13201M,通过递归关系有nnnnnnnnUMUMUMMM*4*3*4*2*4*41,其中2n*2n是阵列中元素的个数,Un是一个2n*2n的方阵,所有元素都是1。根据这个算法,可以得到51371591113614412102802M,为16级灰度的标准图案。M3(8*8阵)比较特殊,称为Bayer抖动表。M4是一个16*16的矩阵。根据上面的算法,如果利用M3,一个像素要用8*8的图案表示,则一幅N*N的图将变成8N*8N大小。如果利用M4,就更不得了,变成16N*16N了。能不能在保持原图大小的情况下利用图案化技术呢?一种很自然的想法是:如果用M2阵,则将原图中每8*8个点中取一点,即重新采样,然后再应用图案化技术,就能够保持原图大小。实际上,这种方法并不可行。首先,你不知道这8*8个点中找哪一点比较合适,另外,8*8的间隔实在太大了,生成的图象和原图肯定相差很大,就象图1最右边的那幅图一样。我们可以采用这样的做法:假设原图是256级灰度,利用Bayer抖动表,做如下处理if(g[y][x]2)bayer[y&7][x&7]then打一白点else打一黑点其中,x,y代表原图的像素坐标,g[y][x]代表该点灰度。首先将灰度右移两位,变成64级,然后将x,y做模8运算,找到Bayer表中的对应点,两者做比较,根据上面给出的判据做处理。我们可以看到,模8运算使得原图分成了一个个8*8的小块,每个小块和8*8的Bayer表相对应。小块中的每个点都参与了比较,这样就避免了上面提到的选点和块划分过大的第四讲图象的半影调和抖动技术phoenix的Photoshop-3-问题。模8运算实质上是引入了随机成分,这就是我们下面要讲到的抖动技术。下面的图5就是利用这个算法,使用M3(Bayer抖动表)阵得到的,图6是使用M4阵得到的,可见两者的差别并不是很大,所以一般用Bayer表就可以了。图5.利用M3抖动生成的图图6.利用M4抖动生成的图下面是算法的源程序,是针对Bayer表的,因为它是个常用的表,我们不再利用Limb公式,而是直接给出。针对M4阵的算法是类似的,不同的地方在于,要用Limb公式得到M4阵,灰度也不用右移2位。要注意的是,为了处理的方便,我们的结果图仍采用256级灰度图,不过只用到了0和255两种灰度。BYTEBayerPattern[8][8]={0,32,8,40,2,34,10,42,48,16,56,24,50,18,58,26,12,44,4,36,14,46,6,38,60,28,52,20,62,30,54,22,3,35,11,43,1,33,9,41,51,19,59,27,49,17,57,25,15,47,7,39,13,45,5,37,63,31,55,23,61,29,53,21};BOOLLimbPatternM3(HWNDhWnd){DWORDBufSize;LPBITMAPINFOHEADERlpImgData;LPSTRlpPtr;HLOCALhTempImgData;第四讲图象的半影调和抖动技术phoenix的Photoshop-4-LPBITMAPINFOHEADERlpTempImgData;LPSTRlpTempPtr;HDChDc;HFILEhf;LONGx,y;unsignedcharnum;BufSize=bf.bfSize-sizeof(BITMAPFILEHEADER);//要开的缓冲区大小if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL){MessageBox(hWnd,Errorallocmemory!,ErrorMessage,MB_OK|MB_ICONEXCLAMATION);returnFALSE;}lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);//拷贝头信息和位图数据memcpy(lpTempImgData,lpImgData,BufSize);for(y=0;ybi.biHeight;y++){//lpPtr为指向原图位图数据的指针lpPtr=(char*)lpImgData+(BufSize-LineBytes-y*LineBytes);//lpTempPtr为指向新图位图数据的指针lpTempPtr=(char*)lpTempImgData+(BufSize-LineBytes-y*LineBytes);for(x=0;xbi.biWidth;x++){num=(unsignedchar)*lpPtr++;if((num2)BayerPattern[y&7][x&7])//右移两位后做比较*(lpTempPtr++)=(unsignedchar)255;//打白点else*(lpTempPtr++)=(unsignedchar)0;//打黑点}}if(hBitmap!=NULL)DeleteObject(hBitmap);hDc=GetDC(hWnd);//形成新的位图hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,(LONG)CBM_INIT,(LPSTR)lpTempImgData+sizeof(BITMAPINFOHEADER)第四讲图象的半影调和抖动技术phoenix的Photoshop-5-+NumColors*sizeof(RGBQUAD),(LPBITMAPINFO)lpTempImgData,DIB_RGB_COLORS);hf=_lcreat(c:\\limbm3.bmp,0);_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));_lwrite(hf,(LPSTR)lpTempImgData,BufSize);_lclose(hf);//释放内存和资源ReleaseDC(hWnd,hDc);LocalUnlock(hTempImgData);LocalFree(hTempImgData);GlobalUnlock(hImgData);returnTRUE;}2.抖动法(dithering)让我们考虑更坏的情况:即使使用了图案化技术,仍然得不到要求的灰度级别。举例说明:假设有一幅600*450*8bit的灰度图,当用分辨率为300dpi*300dpi的激光打印机将其打印到8*6英寸的纸上时,每个像素可以用(2400/600)*(1800/450)=4*4个点大小的图案来表示,最多能表示17级灰度,无法满足256级灰度的要求。可有两种解决方案:1.减小图象尺寸,由600*450变为150*113;2.降低图象灰度级,由256级变成16级。这两种方案都不理想。这时,我们就可以采用“抖动法(dithering)”的技术来解决这个问题。其实刚才给出的算法就是一种抖动算法,称为规则抖动(regulardithering)。规则抖动的优点是算法简单;缺点是图案化有时很明显,这是因为取模运算虽然引入了随机成分,但还是有规律的,另外,点之间进行比较时,只要比标准图案上点的值大就打白点,这种做法并不理想,因为,如果当标准图案点的灰度值本身就很小,而图象中点的灰度只比它大一点儿时,图象中的点更接近黑色,而不是白色。一种更好的方法是将这个误差传播到邻近的像素。下面介绍的Floyd-Steinberg算法就采用了这种方案。假设灰度级别的范围从b(black)到w(white),中间值t为(b+w)/2,对应256级灰度,b=0;w=255;t=127.5;设原图中像素的灰度为g,误差值为
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码







 sd1235447
sd1235447
本文标题:图像处理(第四讲)
链接地址:https://www.777doc.com/doc-2598274 .html