您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 管理学资料 > Mecanum四轮全方位移动机构运动分析与仿真-刘洲
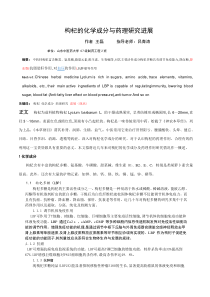
Mecanum刘 洲,吴洪涛(, 210016):全方位移动机器人具有平面运动的全部3个自由度,机动性好。介绍了技术较为成熟的Mecanum全方位轮的原理结构,分析了由4个Mecanum全方位轮组成的全向移动机构的运动原理以及轮体主要参数的定义,并且进行了基于ADAMS软件的运动仿真。:Mecanum轮;运动特性;全方位移动机构;运动仿真:TP24 :A :1672-1616(2011)05-0043-04 。,,,、。、、,、。、[1-7]。,。、3。3,3,。,。,Mecanum、。1 MecanumMecanumBengtIlon1973。Mecanum。,,45°[1-7]。3,,,。,,。3Mecanum。41[1,5]。i2。图1 麦卡纳姆车轮结构示意图图2 第i轮结构4v1,v2,v3,v4,vg1,vg2,vg3,vg4。OS,OCii,xSOSyS,xCiOCiyCiOCi。:2010-11-02: (1987-),,,,。43·· Mecanum…… 2,2,xC2OC2yC2vOC2: vOC2=Rcosα0sinαω2vg2(1)xSOSySvO2: vO2=10l101-l2vxvyω0(2)(1)、(2):10l101-l2vxvyω0=Rcosα0sinαω2vg2(3):ω1ω2ω3ω3=Kvxvyω0= 1R1Rtanα-(l1tanα+l2)Rtanα1R-1Rtanαl1tanα+l2Rtanα1R-1Rtanα-(l1tanα+l2)Rtanα1R1Rtanαl1tanα+l2Rtanαvxvyω0= 1R11-(l1+l2)1-1l1+l21-1-(l1+l2)11l1+l2vxvyω0(4)K。,,,[8]。Mecanum,4,。,,,,。,rank(K)=3,,rank(K)3,,[5-6,9],:l1tanα+l2Rtanα≠0α≠-arctanl2l1(5) (4):vx,vy,ω0,。:vx=0,vy=0,ω0≠0,OS,-ω1=ω2=-ω3=ω4=(l1tanα+l2)Rtanαω0(6) vx=vcosθ,vy=vsinθ,ω0=0,vyθ,:ω1=ω4=v(cosθ-sinθ/tanα)/Rω2=ω3=v(cosθ+sinθ/tanα)/R(7) ,,ω1,ω2,ω3,ω4,。2 ,Mecanum,。3[7]。AB。ABz45°。ABAB,[6-7]。图3 辊子曲线的生成示意图3ABxy、z45°,CAB。R,AB,:12x2+y2-R2=0(8) 。λ,λ=11,λ12,2。4420113 40 5λ=N(φ-2θ0)R2πR=N2π(φ-2θ0)(9):θ0;N;φ,。r:r=CC′=DE′=AEsinφ-θ2=2Rsinθ2sinφ-θ2(10)rmax=rθ=φ2,rmin=rθ=θ0。:L=2(AD-2AD′|θ=θ0)=2[b-2AE|θ=θ0cos(φ-θ02)]=2[b-4Rsinθ02cos(φ-θ02)](11) Rb,,rmin,。MathematicaMATLAB,4Mathematica。图4 Mecanum轮系辊子轮廓示意图3 Mecanum,Solid-Works。Solid-Works,,。,4MecanumADAMS,5。图5 移动系统ADAMS造型图,4,,,6,7。图6 全方位移动平台直线运动质心位移—时间曲线图7 全方位移动平台原地转动质心位移—时间曲线,,,7:,5mm,180mm×210mm,。8。845·· Mecanum……:,0.4mm,60mm,Δ=0.4/60=0.67%。。图8 全方位移动平台竖直跳动幅度—时间曲线4 Mecanum,。,,3。,,,,。,,,,。:[1] IoanDoroftei,VictorGrosu,VeaceslavSpinu.DesignandcontrolofanOmni-Directionalmobilerobot[C]//NovelAlgorithmsandTechniquesInTelecommunications,AutomationandIndus-trialElectronics.SpringerScience+BusinessMediaB.V,2008:105-110.[2] JefriEfendiMohdSalih,MohamedRizon,SazaliYaacob,etal.DesigningOmni-Directionalmobilerobotwithmecanumwheel[J].AmericanJournalofAppliedSciences,2006,3(5):1831-1835.[3] OlafDiegel,AparnaBadve,GlenBright,etal.Improvedmecanumwheeldesignforomnidirectionalrobots[C]//IEEEInternationalConferenceonRoboticsandAutomation.Auck-land,NewZealand,2002:117-121.[4] GfrerrerA.Geometryandkinematicsofthemecanumwheel[J].ComputerAidedGeometricDesign,2008,25(25):784-791.[5] , , .ZigBee[J].,2008,36(7):354-356.[6] .[J].,2006(12):63-65.[7] , ,,.[J].,2009,11(2):65-68.[8] .[M].:,1996.[9] .Mecanum[J].,2009,45(5):307-310.TheMotionAnalysisandSimulationofOmni-DirectionalMovingMechanismwithFourMecanumWheelsLIUZhou,WUHong-tao(NanjingUniversityofAeronauticsandAstronautics,JiangsuNanjing,210016,China)Abstract:Omni-directionalmobilerobotpossessesthreedegreeoffreedomontheplaneandhasagoodflexi-bility.ItintroducessomeprincipleandstructureoftheMecanumwheel,analyzesthemovementcoordinatedprincipleofOmni-directionalmobilemechanismwithfourMecanumwheel,designssomeimportantparame-tersofMecanumwheels,andsimulatesthesystemmotionbasedonADAMSplatform.Keywords:MecanumWheel;MotionCharacteristics;Omni-DirectionalMovingMechanism;MotionSimu-lation 4620113 40 5
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 uflisu
uflisu
本文标题:Mecanum四轮全方位移动机构运动分析与仿真-刘洲
链接地址:https://www.777doc.com/doc-2707998 .html