您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 项目/工程管理 > 自动齿轮变速箱齿比的计算与实例
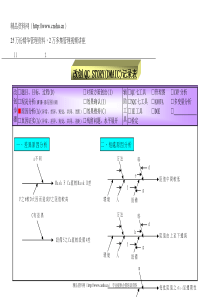
自动齿轮变速箱齿轮比的计算与选择(实例)第三单元-课目纲要概述-目的与笵围自动齿轮变速箱齿轮比的计算法a)平行轴齿轮组b)行星轴齿轮系•表格法•杠杆比例法•机构学分析法•以上三种计算法的优劣比较行星齿轮系统在变速箱中各种排列组合的方式杠杆比例尺寸的导算规律及步骤自动变速箱齿轮比(GearRatio)选择法的一个实例总结1.5Hrs概述:如前所述,全球目前现有及未来的自动齿轮变速箱,除了AMT及DCT是平行轴外,其它大部份均以行星齿轮为主导,而平行轴的齿轮组的总齿轮比(输入/输出)的计算,基本上比起行星齿轮速比要简易的多,而且换档离合器机构的排列及选择也是如此.鉴之于此,此课程的主要对象,也因之针对着行星齿轮系统的结构需求而制定.平行轴自动变速箱(DCT)的齿轮系统安排齿轮比-平行轴齿轮変速箱齿速比(i)=----------------------------------------从动轮齿数(T2xT4x….xTn-1)主动轮齿数(T1xT3x….xTn)各种行星齿轮系的基本类型及其结构A)通常使用的行星齿轮系统单行星组系双行星组系台阶式行星系Ravignaux行星系(StepPinion)B)非常用行星歯轮系统双太阳轮-双行星轮(DS-DP)双内齿轮-双行星轮(DR-DP)P2P1P2P1S1S2R1R2长轴行星齿行星齿轮组的基本架抅及其传动规则一般行星齿轮组,当使用于转动扭力/速度时,下列的构件中之一必须紧固不动(Held/Ground),而其余的两个构件则可分别作为输入(Input)以及输出(Output)端:太阳轮(S),行星支架(PC)及内齿轮(R)差动(differential)太阳轮(S)行星支架(PC)内齿轮(R)行星轮(P)行星齿轮组或系统不常被一般齿轮工程师使用的主因齿轮比(GearRatio)的计算,尤其在面临多档行星齿轮系统的设计时.较平行轴(Parallel/CounterShaft)齿轮系要复杂的多齿轮比(GearRatio)较受限制内齿轮及行星支架的设计及制造工艺较困难,成本也高多档行星齿轮系统构件的安装组合及动力(功率)流程(PowerFlow)的选择十分复杂,不易掌控传动构件的测试台架设计较复杂换档机构的分析.及控制系统及仿真模拟较复杂其地因素-投资成本,人力资源等的考量SurveyA)表格法(TABULATIONMETHOD)a)单一行星齿轮组b)双行星齿轮组c)复合式(Compound)行星齿轮系•辛普森行星齿轮系统(SimpsonGearTrain)•Ravignaux行星齿轮系统三种常用齿轮比(GearRatio/s)的计算方法a)单一的行星齿轮组–表格计算法构件(齿轮比)行星轮速(=P-C)(相讨干行星支架速度)SCRP10-S/R-S/P-S/P対以上每个行格乘以“-R/S”值-R/S01R/PR/P対以上每个行格加以“-1”值-(R+S)/S-10(R-P)/PR/P対以上每个行格乘以“–S/(R+S)”值1S/(R+S)0-S/(R-P)/(P(R+S))-RS/(P(R+S))対以上每个行格加以“-1”值0-R/(R+S)-1-R(S-P)/(P(R+S))RS/(P(R+S)対以上每个行格乘以“–(R+S)/R”值01(R+S)/R(S-P)/PS/P单一行星齿轮比计算总结表轮入(I)紧固(G)输出(O)轮出/输入速度比行星齿速度比(相対行星支架)Sun=1Carrier=0Ring-S/R-S/PSUN=1Ring=0CarrierS/(R+S)R/PRING=1Sun=0CarrierR/(R+S)R/PRING=1Carrier=0Sun-R/S-RS/(P(R+S))Carrier=1Sun=0Ring(R+S)/RRS/(P(R+S))Carrier=1Ring=0Sun(R+S)/SS/P构件行星速度比(相対行星支架)SCRP1P2=P1–C=P2-C10S/R-S/P1S/P2-S/P1S/P2対以上每个行格乘以“R/S”值R/S01-R/P1R/P2-R/P1R/P2対以上每个行格加以“-1”值(R-S)/S-10-(R+P1)/P1(R-P2)/P2-(R+P1)/P1(R-P2)/P2対以上每个行格乘以“S/(R-S)”值1-S/(R-S)0-S(R+P1)/(P1(R-S))S(R-P2)/(P2(R-S))-RS/(P1(R-S))RS/(P2(R-S))対以上每个行格加以“-1”值0-R/(R-S)-1-(R(S+P1)/(P1(R-S))R(S-P2)/(P2(R-S))-RS/(P1(R-S))RS/(P2(R-S))対以上每个行格乘以“–(R-S)/R”值01(R-S)/R(S+P1)/P1-(S-P2)/P2(S+P1)/P1-(S-P2)/P2双行星齿轮比计算总结表输入(I)紧固(G)输出端(O)速度比行星1速度比(相対行星支架)行星2速度比(相対行星支架)Sun=1Carrier=0RingS/R-S/P1S/P2SUN=1Ring=0Carrier-S/(R-S)-RS/(P1(R-S))RS/(P2(R-S))RING=1Sun=0CarrierR/(R-S)RS/((P1(R-S)-RS/((P2(R-S)RING=1Carrier=0SunR/S-R/P1R/P2Carrier=1Sun=0Ring(R-S)/R(S+P1)/P1-(S-P2)/P2Carrier=1Ring=0Sun-(R-S)/S(R+P1)/P1-(R-P2)/P2b)双行星齿轮组–表格计算法Cc)复合式系统齿轮比-表格计算法实例-辛普森(Simpson)行星齿轮系统-使用两个单一行星组来合成一个复合式的齿轮系统S2/(S2+R2)=DB)杠杆比例法(LEVERDIAGRAMMETHOD)a)单一行星齿轮组b)双行星齿轮组c)复合式(Compound)行星齿轮系•辛普森行星齿轮系统(SimpsonGeartrain)•Ravignaux行星齿轮系统三种常用齿轮比(GearRatio)的计算方法a)杠杆比例计算法-单一行星齿轮组内齿轮[R]Pinion大阳轮(S)PCRPCSSR需要三道力量以达到杠杆上的平衡即:输入(I),输出(O)及紧固力G)IOGOGIGOIOIGIGOGIO6种可行的速度比排列又T.R=1/S.R.杠杆2020/1/1915单一行星齿轮比总结-杠杆比例法PCRSIOGOGIGOIOIGIGOGIO内齿轮[R]P2太阳齿(S)P1PCSRb)杠杆比例计算法-双行星齿轮组PC2020/1/1917双行星齿轮比总结-杠杆比例法C)复合式系统齿轮比-杠杆比例计算法实例1-辛普森(Simpson)行星齿轮系统-使用两个单一行星组来合成一个复合式的齿轮系统杠杆比例法R1C1S1R2C2S2K1S1K1R1K2S2K2R2K1R1=K2(S2+R2)K2=K1R1/(S2+R2)K1S1K1R1S2/(S2+R2)K1R1R2/(S2+R2)R1C1/R2C2S1/S2由K2転换到K1设计要求(R/S=?)R1/S1=C1R2/S2=C22020/1/1919K1S1K1R1S2/(S2+R2)K1R1R2/(S2+R2)R1C1/R2C2S1/S2实例一辛普森行星齿轮系统速度比总结运転条件系依上图所示2020/1/1920杠杆比例计算法(LEVERDIAGRAM)的广泛应用,ChainC)机构学分析法(KINEMATICANALTICALMETHOD)a)单一行星齿轮组b)双行星齿轮组c)复合式(Compound)行星齿轮系•辛普森行星齿轮系统(SimpsonGearTrain)•Ravignaux行星齿轮系统(见附件)三种常用的齿轮比(GearRatio)计算方法工程术语(Nomenclature)代码符号D=齿轮节圆(PitchDiameter)M=模数(法向)-NormalModuleR(半径mm)V(瞬时的速度)-(M/S)RRi=内齿轮节圆半径(I=1,2,3…)VRi=内齿轮速度(I=1,2,3…)RPi=行星齿轮节圆半径(I=1,2,3…)Vpi=行星齿轮速度(I=1,2,3…)RSi=太阳轮节圆半径(I=1,2,3…)VSi=太阳轮速度(I=1,2,3…)RCi=行星支架半径(I=1,2,3…)VCi=行星架速度(I=1,2,3…)Z(齿数)w(角速度-Radian/S)ZRi=内齿轮齿数(I=1,2,3…)wRi=内齿轮角速度(I=1,2,3…)ZPi=行星齿轮齿数(I=1,2,3…)wPi=行星齿轮角速度(I=1,2,3…)RSi=太阳轮齿数(I=1,2,3…)wSi=太阳轮角速度(I=1,2,3…)T(力矩N-m)wCi=行星架角速度(I=1,2,3…)TRi=内齿轮所承受力矩(I=1,2,3…)n(転速-RPM)TCi=行星支架所承受的力矩(I=1,2,3…)nRi=内齿轮速度(I=1,2,3…)TSi=太阳轮所承受的力矩(I=1,2,3…)nPi=行星齿轮速度(I=1,2,3…)F(传动力,Newtons)nSi=太阳轮速度(I=1,2,3…)FRi=内齿轮所受的传动力(I=1,2,3…)nCi=行星架速度(I=1,2,3…)FCi=行星支架所受的传动力(I=1,2,3…)FSi=太阳轮所受的传动力(I=1,2,3…)I=1,2,3…;乃系各行星齿轮组的代号理论分析法–ANALYTICALMETOD旋転角速度(w)方向性的识别CCW“-”CW”+”速度(V)方向性的识别-+2020/1/1923理论分析法--各速度矢量方向性的规定及识别2020/1/1924内齿轮行星轮太阳轮着地紧固理论分析法-速度方程式的导演步骤以下的程序系导引速度方程式的规则-单行星齿轮组:1.紧固内齿轮或太阳齿,仅让非紧固的齿轮作为输入件,同时也使行星架能自由転动.以此导出输入轮和行星轮之间的速度关系式(方程式1),此方程式中应包含行星架的転速;方程式的速度矢量应和転动方向互相吻合.2.重复第一步骤,但替换上述的紧固件及输入件(方程式2).3.从以上两个方程式中去除行星轮的速度,即可得到各运転主件之间的速度关系,即输出/输入的速度比来.4.当各运転主件的速度犾取後,行星齿轮的速度则可由方程式1或2中取得.图示12020/1/1925因为R=Z/2xM;此処Z为齿数,M为齿轮模数(4)将(4)代入以上(1),(2)(3)方程式中,可得行星齿轮组各転动元件的关系式单一行星齿轮组各构件的転速关系式wRxZR=wPxZP+wCxZR(5)wSxZS=-wPxZP+wCxZS(6)wRxZR+wSxZS=wC(ZR+ZS)(7)2020/1/1926理论分析法-单一行星齿轮组根据以上的方程式导引规则2020/1/1927理论分析法-双行星齿轮组根据以上的方程式的异演规则:各构件的速度关系式各构件的力矩关系式wRxZR=wP1xZP1+wCxZR(1)Ti(Input)=1(1')wSxZS=-wP2xZP2+wCxZS(2)To(Output)=-1/wO(2')wRxZR-wSxZS=wC(ZR-ZS)(3)TR(Reaction)=-(Ti+TO)(3')-wP1xZP1=wP2xZP2(4)案例123456与输入件的速度比(S/R)输入(I)Sun(S)SunRingRingCarrierCarrier输出(O)Ring(R)CarrierSunCarrierRingSun紧固(G)Carrier(C)RingCarrierSunSunRing输入件速度(设定为1.0)TSun=1TSun=1TRing=1TRing=1TCarrier=1TCarrier=1由(3)得到与输入件的速度比wC=0wR=0wC=0wS=0wS=0wR=0(ZS/ZR)ZS/(ZR+ZS)(ZR/ZS)ZR/(ZR-ZS)(ZR-ZS)/ZS-(ZR-ZS)/ZS由(1)式得到P1行星轮的速度比wC=0wR=0wC=0wS=0wS
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 xuxuqing123
xuxuqing123
本文标题:自动齿轮变速箱齿比的计算与实例
链接地址:https://www.777doc.com/doc-3167315 .html