您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 经营企划 > 微机计算机控制技术课后于海生(版)练习题详解答案
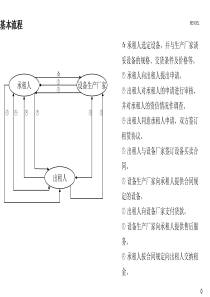
1/283.微型计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?由四部分组成。图1.1微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。其中操作台应具备显示功能,即根据操作人员的要求,能立即显示所要求的内容;还应有按钮,完成系统的启、停等功能;操作台还要保证即使操作错误也不会造成恶劣后果,即应有保护功能。(4)检测与执行机构a.测量变送单元:在微机控制系统中,为了收集和测量各种参数,采用了各种检测元件及变送器,其主要功能是将被检测参数的非电量转换成电量,例如热电偶把温度转换成mV信号;压力变送器可以把压力转换变为电信号,这些信号经变送器转换成统一的计算机标准电平信号(0~5V或4~20mA)后,再送入微机。b.执行机构:要控制生产过程,必须有执行机构,它是微机控制系统中的重要部件,其功能是根据微机输出的控制信号,改变输出的角位移或直线位移,并通过调节机构改变被调介质的流量或能量,使生产过程符合预定的要求。例如,2/28在温度控制系统中,微机根据温度的误差计算出相应的控制量,输出给执行机构(调节阀)来控制进入加热炉的煤气(或油)量以实现预期的温度值。常用的执行机构有电动、液动和气动等控制形式,也有的采用马达、步进电机及可控硅元件等进行控制。6.操作指导、DDC和SCC系统工作原理如何?它们之间有何区别和联系?(1)操作指导控制系统:在操作指导控制系统中,计算机的输出不直接作用于生产对象,属于开环控制结构。计算机根据数学模型、控制算法对检测到的生产过程参数进行处理,计算出各控制量应有的较合适或最优的数值,供操作员参考,这时计算机就起到了操作指导的作用。其原理框图如图1.2所示。图1.2操作指导控制系统原理框图(2)直接数字控制系统(DDC系统):DDC(DirectDigitalControl)系统就是通过检测元件对一个或多个被控参数进行巡回检测,经输入通道送给微机,微机将检测结果与设定值进行比较,再进行控制运算,然后通过输出通道控制执行机构,使系统的被控参数达到预定的要求。DDC系统是闭环系统,是微机在工业生产过程中最普遍的一种应用形式。其原理框图如图1.3所示。图1.3DDC系统原理框图(3)计算机监督控制系统(SCC系统):SCC(SupervisoryComputerControl)系统3/28比DDC系统更接近生产变化的实际情况,因为在DDC系统中计算机只是代替模拟调节器进行控制,系统不能运行在最佳状态,而SCC系统不仅可以进行给定值控制,并且还可以进行顺序控制、最优控制以及自适应控制等。SCC系统的原理框图如图1.4所示。图1.4SCC系统原理框图SCC是操作指导控制系统和DDC系统的综合与发展。4.简述光电耦合器的工作原理及在过程通道中的作用。光电耦合器由封装在一个管壳内的发光二极管和光敏三极管组成,如图2.1所示。输入电流流过二极管时使其发光,照射到光敏三极管上使其导通,完成信号的光电耦合传送,它在过程通道中实现了输入和输出在电气上的完全隔离。图2.1光电耦合器电路图10.设被测温度变化范围为0oC~1200oC,如果要求误差不超过0.4oC,应选用分辨为多少位的A/D转换器?选择依据:124.0120012logn11.设计出8路模拟量采集系统。请画出接口电路原理图,并编写相应的8路模拟量数据采集程序。4/28本例给出用8031、DAC0809设计的数据采集系统实例。把采样转换所得的数字量按序存于片内RAM的30H~37H单元中。采样完一遍后停止采集。其数据采集的初始化程序和中断服务程序如下:初始化程序:MOVR0,#30H;设立数据存储区指针MOVR2,#08H;设置8路采样计数值SETBIT0;设置外部中断0为边沿触发方式SETBEA;CPU开放中断SETBEX0;允许外部中断0中断MOVDPTR,#FEF8H;送入口地址并指向IN0LOOP:MOVX@DPTR,A;启动A/D转换,A的值无意义HERE:SJMPHERE;等待中断中断服务程序:MOVXA,@DPTR;读取转换后的数字量MOV@R0,A;存入片内RAM单元INCDPTR;指向下一模拟通道INCR0;指向下一个数据存储单元DJNZR2,INT0;8路未转换完,则继续CLREA;已转换完,则关中断CLREX0;禁止外部中断0中断RETI;中断返回INT0:MOVX@DPTR,A;再次启动A/D转换RETI;中断返回5/2813.采用DAC0832和PC总线工业控制机接口。请画出接口电路原理图,并编写产生三角波、梯形波和锯齿波的程序。本章作业设计一八路数据采集及其回放系统。要求八路数据巡回检测,存储10组数据,输数据为电压信号(0-5V),检测精度1%。CPU、AD、DA可任选。5.若加工第一象限直线OA,起点O(0,0),终点A(11,7)。要求:(1)按逐点比较法插补进行列表计算;(2)作出走步轨迹图,并标明进给方向和步数。解:由题意可知xe=11,ye=7,F0=0,我们设置一个总的计数器Nxy,其初值应为ILEVCCVREFDI7…CSDI0DAC0832IOUT22WRXFERDGNDAGNDD7~D0地址译码0Y地址线1WRIO/MWR8086CPURfb+-IOUT1UoA+5V数据总线6/28Nxy=|7-0|+|11-0|=18,则插补计算过程如表3—1所示。根据插补计算过程表所作出的直线插补走步轨迹图如下图所示。表3—1步数偏差判别坐标进给偏差计算终点判别起点F0=0Nxy=181F0=0+XF1=F0-ye=-7Nxy=172F10+YF2=F1+xe=4Nxy=163F20+XF3=F2-ye=-3Nxy=154F30+YF4=F3+xe=8Nxy=145F40+XF5=F4-ye=1Nxy=136F50+XF6=F5-ye=-6Nxy=127F60+YF7=F6+xe=5Nxy=118F70+XF8=F7-ye=-2Nxy=109F80+YF9=F8+xe=9Nxy=910F90+XF10=F9-ye=2Nxy=811F100+XF11=F10-ye=-5Nxy=712F110+YF12=F11+xe=6Nxy=613F120+XF13=F12-ye=-1Nxy=514F130+YF14=F13+xe=10Nxy=415F140+XF15=F14-ye=3Nxy=316F150+XF16=F15-ye=-4Nxy=217F160+YF17=F16+xe=7Nxy=118F170+XF18=F16-ye=0Nxy=03.5.设加工第一象限的圆弧AB,起点A(6,0),终点B(0,6)。要求:(1)按逐点比较法插补进行列表计算;(2)作出走步轨迹图,并标明进给方向和步数。解:插补计算过程如表3—2所示。终点判别仍采用第二种方法,设一个总的计数器Nxy,每走一步便减1操作,当Nxy=0时,加工到终点,插补运算结束。下图为插补过程中的走步轨迹。7/281023456123456NR1yx表3—2步数偏差判别坐标进给偏差计算坐标计算终点判别起点F0=0x0=6,y0=0Nxy=121F0=0-XF1=0-12+1=-11x1=5,y1=0Nxy=112F10+YF2=-11+0+1=-10x2=5,y2=1Nxy=103F20+YF3=-10+2+1=-7x3=5,y3=2Nxy=94F30+YF4=-7+4+1=-2x4=5,y4=3Nxy=85F40+YF5=-2+6+1=5x5=5,y5=4Nxy=76F50-XF6=5-10+1=-4x6=4,y6=4Nxy=67F60+YF7=-4+8+1=5x7=4,y7=5Nxy=58F70-XF8=5-8+1=-2x8=3,y8=5Nxy=49F80+YF9=-2+10+1=9x9=3,y9=6Nxy=310F90-XF10=9-6+1=4x10=2,y10=6Nxy=211F100-XF11=4-4+1=1x11=1,y11=6Nxy=112F110-XF12=1-2+1=0x12=0,y12=6Nxy=03.6.三相步进电机有哪几种工作方式?分别画出每种工作方式的各相通电顺序和电压波形图。解:有三种工作方式:8/28(1)三相单三拍工作方式各相的通电顺序为A→B→C,各相通电的电压波形如图3.1所示。图3.1单三拍工作的电压波形图(2)三相双三拍工作方式双三拍工作方式各相的通电顺序为AB→BC→CA。各相通电的电压波形如图3.2所示。图3.2双三拍工作的电压波形图(3)三相六拍工作方式在反应式步进电机控制中,把单三拍和双三拍工作方式结合起来,就产生了六拍工作方式,其通电顺序为A→AB→B→BC→C→CA。各相通电的电压波形如图3.3所示。图3.3三相六拍工作的电压波形图3.7.采用8255A作为x轴步进电机和y轴步进电机的控制接口,要求(1)画出接口电路原理图;(2)分别列出x轴和y轴步进电机在三相单三拍、三相双三拍和三相六拍工作方式下的输出字表。9/28电路原理图如图所示三相单三拍控制方式输出字表x轴步进电机输出字表y轴步进电机输出字表存储地址标号低八位输出字存储地址标号高八位输出字ADX100000001=01HADY100000001=01HADX200000010=02HADY200000010=02HADX300000100=04HADY300000100=04H三相双三拍控制方式输出字表x轴步进电机输出字表y轴步进电机输出字表存储地址标号低八位输出字存储地址标号高八位输出字ADX100000011=03HADY100000011=03HADX200000110=06HADY200000110=06HADX300000101=05HADY300000101=05H三相六拍控制方式输出字表x轴步进电机输出字表y轴步进电机输出字表存储地址标号低八位输出字存储地址标号高八位输出字ADX100000001=01HADY100000001=01HADX200000011=03HADY200000011=03HADX300000010=02HADY300000010=02HADX400000110=06HADY400000110=06HADX500000100=04HADY500000100=04H10/28ADX600000101=05HADY600000101=05H2.某系统的连续控制器设计为sTsTsEsUsD2111)()(试用双线形变换法、前向差分法、后向差分法分别求取数字控制器D(Z)。解:双线形变换法:把112zzTs代入,则221121112222211211121TTzTTTT-zTTzzTTzzTT|zDzDzzTs前向差分法:把Tz-z1代入,则221121211111111TTzTTTzTTzTTzTsTsT|sDzDTzs后向差分法:把Tzzs1代入,则221121211111111TTzT
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 pixystone
pixystone
本文标题:微机计算机控制技术课后于海生(版)练习题详解答案
链接地址:https://www.777doc.com/doc-3356553 .html