您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 能源与动力工程 > 不同风机接入电力系统的潮流计算方法比较
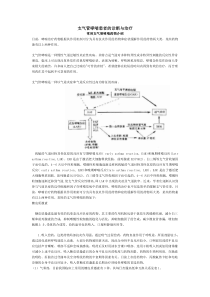
不同风机接入电力系统的潮流计算方法比较中文摘要:各类风机由于其结构特点的不同决定了其接入电力系统的潮流计算方法的差异,通过对普通异步风机、永磁直驱同步风机、双馈异步风机接入电力系统的潮流计算方法讨论和比较,可以更加清楚的掌握对各类风机的使用。关键词:普通异步风机永磁直驱同步风机双馈异步风机电力系统潮流计算正文:近年来随着人们对可持续发展战略的认识风力发电在全球获得了迅猛发展,截止2005年,全球风电装机容量已达,59332MW,排名前几位分别为德国18428MW,西班牙10027MW,美国9149MW,中国以1246MW排第8位/。风电场建设包括风资源测量评估、风场选址、发电机选型、风场内部微观选址、风电场升压站建设、接入电网线路建设等一系列问题、其中风电场选址与接入系统设计都是规划阶段的重要问题其重要性不言而喻、对含风电场电力系统进行潮流计算是规划阶段的基础工作是风电场升压站、接入系统线路方案确定的考虑因素之一,另外在风电系统动态仿真中状态变量的初值也由潮流计算获得,因此对含风电场电力系统进行潮流计算是非常有意义的。风电场的潮流计算主要是对风电并网后根据给定的网络结构和运行条件确定整个网络的电气状态,主要是对风电并网后的电网中各个节点的电压幅值和相角、网络中功率的分布及功率损耗等,并进行越界检查,以了解和评价风电场并网后的运行情况。常用于评估风电机组并网后对电网稳态运行的影响,同时也为分析风电场并网后分析对电网影响等其他理论研究工作的基础,具有重要的意义。国内外对风电潮流的研究有着几十年的历史,风电场的潮流计算主要包括含普通异步电机的风电场潮流计算、含永磁直驱风机的潮流计算和含双馈异步电机的风电场潮流计算。风电场的潮流计算关键是正确建立风电机组的数学模型。电力系统中节点分为PQ节点、PV节点和平衡节点。一般异步发电机本身没有励磁调节装置,不具有调整节点电压的能力,因此不能像常规的同步发电机一样将它视为电压幅值恒定的PV节点,它只能依靠无功补偿装置才能保持风电场出口电压恒定。同样风电场中的异步发电机向系统注入有功功率的同时还要从系统吸收一定的无功功率,吸收的无功大小与发电机的机端电压、发出的有功功率以及滑差有着密切相关,因此不能把它处理为恒功率的PQ节点。一、异步电机计算潮流的方法首先给出了风电场的简化PQ模型、简化RX模型的潮流计算模型,根据两种模型的缺点,提出了一种新的风电场潮流计算模型即为扩展潮流模型。扩展潮流模型将异步发电机直接纳入电力网络,同时将异步发电机等值电路模型的中间激磁支路的端点作为一个虚拟PQ节点进行计算,建立约束方程;建立异步发电机转子侧和定子侧之间的转矩平衡方程。模型建立详细潮流约束方程,推导雅可比矩阵元素,建立扩展风电潮流算法,最后通过算例分析验证算法的有效性异步风力发电机潮流建模—牛顿拉夫逊法潮流计算,牛顿法是解非线性方程的有效的方法。它把非线性方程的求解变成反复的求解线性方程,逐步接近非线性方程的解的过程,通常称为逐次线性化过程。而且牛顿一拉夫逊法求解潮流计算具有平方项收敛的速度,能够使潮流快速收敛。极坐标的牛顿拉夫逊法求解潮流问题的步骤如下:(1)计算有功功率和无功功率的不平衡量假设系统中有n号节点,第1-m号节点为PQ节点,第m+1~n-1号为PV节点,n号为平衡节点。PQ节点不平衡量为:PV节点的功率不平衡量为:(2)计算雅可比矩阵修正方程如下:当i≠j时:当i=j时:(3)潮流方程的求解化成下面的方程根据上述步骤进行潮流计算,直至潮流熟练,输出结果。风电机组容量等值计算,等值后的风电机组容量为:简化结构异步电机潮流算法:对于常规的含普通异步电机的风电场潮流计算时,一般只考虑风力发电机和所连接的电网,忽略了风力机部分以及风力机与发电机之间的联系。同时,在进行潮流计算时,只考虑风机发出的功率全部输送到与风机连接电网中,不考虑风机由于浆矩角的变化对输出功率的影响。在进行风电场的潮流计算时,由于风机的机械部分的变化跟不上电气部分的变化速度,一般将风电场节点作为PQ节点进行处理,但PQ节点的无功功率与风机自身的参数以及风场节点电压有关。忽略空间和时间谐波、忽略励磁饱和、忽略铁损,将转子电阻和转子电抗折算到定子侧,图3.1(a)给出异步电机稳态Ⅱ等值电路,其中是定子和转子电阻,是定子和转子电抗,是激磁回路电抗,S为异步发电机的滑差,是对地并联电容。由于激磁电抗远大于定子电抗,且定子电阻较小。因此把励磁支路外移,合并定子和转子支路。采用简化等值电路时,型简化等值电路如图3.1(b)所示。大型风电场中的普通异步发电机以超同步转速情况下发电运行,发电机将风力机提供的机械功率转化为电磁功率输出,同时从电网或无功补偿装置中吸收无功功率来维持励磁电流的大小。图3—1(b)所示简化等值电路中,定子电抗与转子电抗合并式。定义电纳容性为正,电抗感性为负,将激磁支路的电抗与对地电容并联等值电抗为式。假定异步风机流向电网功率为正,则将异步风机视为发电机处理,定义风机的输出有功功率、发电机滑差以及无功功率如下:无功功率对节点电压求导得:将风电场节点作为PQ节点,根据风机出力曲线确定不同风速下的风机的出力,根据潮流建模公式代入潮流计算,采用算例分析,计算出潮流结果。简化RX模型:采用RX模型进行潮流计算的基本思想是两个迭代步骤:(1)通过常规潮流计算计算出发电机的端电压;(2)通过异步发电机的滑差迭代计算出发电机的滑差。采用简化RX模型避免了潮流计算的两步迭代,能够节省潮流计算的计算时间。图3.1(a)为普通异步发电机的稳态等值电路图,计算出普通异步发电机的电磁功率。由异步发电机原理知道,异步发电机发出的电磁功率。与转子电流、滑差s等有关,其表达式为由此可见异步发电机的输送到电网的电磁功率B随着滑差s的变化而变化,同时风力机的转速、叶尖速比、风能利用系数以及机械功率也与滑差s有关。根据系统的功率平衡的关系,风力机的机械功率等于输送到电网的有功功率相等。由于初始的功率不相等,通过滑差s的迭代使两个功率最终达到平衡。采用牛顿拉夫逊计算潮流,引入风力机的机械功率与送到电网的有功功率的差和滑差修正量,修正方程为:程序框图如下:二、双馈异步风机的潮流计算方法本节在对双馈风机进行潮流建模时,将双馈风电机组的风电场作为恒定功率因数的PQ节点进行处理,功率因数值设为0。98。然后根据双馈异步发电机的稳态等值电路以及双馈风机的发电系统示意图分析各个功率之间的关系,及转矩平衡关系,建立约束方程,推导雅可比矩阵元素,建立潮流计算模型。图4—1(a)为双馈异步发电机的稳态等值电路,图4.1(b)为双馈异步电机系统发电示意图。在图4.1(a),所为定子电压,以为转子电压为转子端到中间节点的复功率,为定子端到中间节点的复功率,其他参数同普通异步电机等值电路的参数意义相同。在图4—1(b)中,风电场的节点设为i节点,为网侧变流器出口电压,分别为风机输入到电网的有功功率和无功功率,为变压器的阻抗。系统中的普通节点的潮流计算约束方程按照节点类型建立约束方程,推导雅可比矩阵元素。风电场节点的潮流计算变量的约束方程根据双馈风电机组的功率平衡关系以及风力机与发电机之间的转矩平衡条件来建立,并推导出对应的雅可比矩阵元素。令,以下定义类似。节点i流向节点W的复功率:节点w流向定子侧的复功率为:节点w流向转子侧的复功率为:转子端流向节点w的复功率为:网侧变流器端口流出的复功率为:节点i流向变流器的复功率为:(1)风机与外网之间的连接根据基尔霍夫电流定律,流入节点电流之和为零。分别注入i节点的有功功率和无功功率。节点i对应于电网有功功率平衡约束方程为:对应变量的雅可比矩阵的元素为:节点i对应于电网的无功功率平衡约束方程为:对应变量的雅可比矩阵元素为:(2)双馈电机的等值电路在双馈异步电机稳态等值电路中,虚拟内节点w连接定子支路和转子支路,以及激磁支路,图4.2为虚拟节点的电路结构。相比较普通异步电机,转子电压值不为零。根据节点功率平衡,建立内节点w有功功率平衡约束方程:推导对应变量的雅可比矩阵元素为:虚拟节点w的无功平衡约束方程为:对应变量的雅可比矩阵的元素为:(3)双馈风机的外部电路对于风电场出口节点来讲,不仅连接外电网和双馈异步发电机的定子侧,还通过变压器连接着网侧变流器,变压器的阻抗为为风电场出口处的结构,根据基尔霍夫电流原理,对i节点注入功率之和为0。建立i节点与发电机之间功率平衡约束方程。对i节点与发电机部分建立有功功率平衡约束方程:对应的雅可比矩阵元素为:节点i对与发电机部分建立无功功率平衡约束方程:对应变量的雅可比矩阵的元素为:在稳态运行时,忽略变换器的开关损耗。根据能量守恒原理,背靠背变流器输出有功功率之和等于零,即向两侧流出(或注入)的有功功率不变。网侧变流器输出无功为给定值一般取零,以防止PV控制方式下,电网需求无功过小,网侧变流器输出无功倒流至异步电机。对变流器建立约束方程,并推导雅可比矩阵元素。背靠背变流器有功功率的约束方程如下:对应变量的雅可比矩阵的元素为:由于变流器之间不考虑无功功率的传输,网侧变流器采用单位功率因数的控制方式运行,的值设为0。对应的网侧变流器的无功功率约束方程为:对应变量的雅可比矩阵为:(4)转矩平衡简化模型双馈异步发电机的电磁功率为:转矩平衡方程为:双馈风机的机械功率采用最大功率跟踪计算,其表达式为:和普通异步电机相比,在双馈异步电机的转矩平衡方程时,考虑了转子电压对功率平衡的影响。对应变量的雅可比矩阵元素为:根据潮流计算约束方程以及推导雅可比矩阵元素,建立潮流计算模型:双馈风电机组潮流计算的程序框图:三、永磁直驱同步风机的潮流计算牛顿法是解非线性方程的有效的方法。它把非线性方程的求解变成反复的求解线性方程,逐步接近非线性方程的解的过程,通常称为逐次线性化过程。这是牛顿法的核心。用牛顿法解三相潮流问题的步骤如下:(1)、计算功率不平衡方程式中表示了一个有n+1个母线的系统功率不平衡矩阵,其中有m个PQ母线,n-m个PV母线,1个平衡节点。PQ节点的功率不平衡量为该节点的功率给定值与当前电压计算出来的实际功率差,可表示为:其中i=1,2,3….,p=a,b,c。而对PV节点来说,节点电压幅值是给定的,不再作为变量。同时,该点无法预先给定无功功率。这样,该点的无功不平衡量也就失去了约束作用。因此,在迭代过程中无须计算与PV节点有关的无功功率方程式。只有当迭代结束后,即各节点的电压向量求得后,再求PV节点应当维持的无功功率。(2)计算雅可比矩阵(4)含风电场的电力系统三相潮流的求解最终能化成求解下列方程风电场在牛顿法中的处理风电场等各种分布式电源可以建立成PQ节点,PV节点,PI节点和P-Q(V)节点这四种节点类型。对PQ类型的分布式电源只需将它们简单处理成功率值是负的负荷即可。本节主要分析其他三种类型的分布式电源在程序中的处理。(1)P恒定,V恒定的PV节点PV节点可以直接代入牛顿法中处理。若PV母线与系统通过n(n=l,2,3…)相线路连接,则母线上各节点注入功率为母线总注入功率的n分之一。在每次迭代后,可以求出节点的电压相角和无功功率。若计算出的节点无功越限,则将其转换成对应的PQ节点,Q值等于该分布式电源能发出的最大无功值。如果在后续迭代中,又出现该节点电压越界,重新将其转换成PV节点。(2)P恒定,电流幅值I恒定的PI节点PI节点不可以直接代入牛顿法中处理,所以在每次迭代前须做一定的处理。若PI母线与系统通过n(n=l,2,3…)相线路连接,则母线上各节点注入功率为母线总注入功率的n分之一。相应的无功功率可以由上一次迭代得到的电压,给定的电流幅值和有功功率计算得出:其中,为第k+1次迭代的分布式电源的无功功率值;五分别为第k次迭代得到的电压的实部和虚部;I为恒定的分布式电源的电流相量的幅值;尸为恒定的有功功率值。因此在进行潮流计算时,第抖1次迭代前可以把PI节点的无功注入量求出,在第k+l迭代过程中便可将PI节点处理成有功和无功输出分别为P和的PQ节点。在每次迭代后,可以求出节点的电压相角和无功功率。PI
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 linyipei
linyipei
本文标题:不同风机接入电力系统的潮流计算方法比较
链接地址:https://www.777doc.com/doc-3414296 .html