您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 工业机器人技术及应用(教案)5-搬运机器人及其操作应用
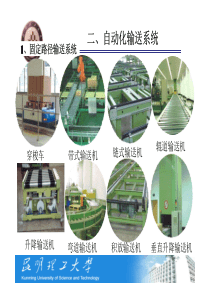
1第五章搬运机器人及其操作应用5.1搬运机器人的分类及特点5.2搬运机器人的系统组成5.3搬运机器人的作业示教5.3.1冷加工搬运机器人5.3.2热加工搬运机器人学习目标导入案例课堂认知扩展与提高本章小结思考练习5.4搬运机器人的周边设备5.4.1周边设备5.4.1周边设备课前回顾如何使用在线示教方式进行工业机器人任务编程?如何进行工业机器人离线作业示教再现?学习目标认知目标了解搬运机器人的分类及特点掌握搬运机器人的系统组成及其功能熟悉搬运机器人作业示教的基本流程熟悉搬运机器人的周边设备与布局能力目标能够识别搬运机器人工作站基本构成能够进行搬运机器人的简单作业示教导入案例机器人助力机床上下料,国产高效智能压铸装备研制成功智能压铸岛是以压铸机为核心设备构成的一组智能化生产单元,以无人化生产管理方式自动完成从原材料到合格铸件成品间的工艺生产流程,实现压铸生产的程序化、数字化和远程控制。高效智能压铸岛以压铸机为核心,配备3-10个机器人和多部AGV小车,集成多个控制系统、伺服系统、检测系统于一体,包括铝液智能熔化系统、伺服定量浇注系统、炉料回收系统、智能熔体含气量检测系统、真空压铸系统自动模温机、自动三维伺服喷涂机械手、耐高温抗腐蚀的装件2取件机器人、镶嵌自动快速加热和均温装置、自动型芯冷却系统、自动余料去除及飞边清理装置、大型精密压铸模具、输送带、冷却装置、在线智能检测系统、激光打标机、智能转运小车、压铸生产信息化管理系统、嵌入式专用控制器、压铸专家系统等设备和系统。课堂认知5.1搬运机器人的分类及特点搬运机器人具有通用性强、工作稳定的优点,且操作简便、功能丰富,逐渐向第三代智能机器人发展,其主要优点有。动作稳定和提高搬运准确性。提高生产效率,解放繁重体力劳动,实现“无人”或“少人”生产。改善工人劳作条件,摆脱有毒、有害环境。柔性高、适应性强,可实现多形状、不规则物料搬运。定位准确,保证批量一致性。降低制造成本,提高生产效益。从结构形式上看,搬运机器人可分为龙门式搬运机器人、悬臂式搬运机器人、侧壁式搬运机器人、摆臂式搬运机器人和关节式搬运机器人。龙门式搬运机器人其坐标系主要由X轴、Y轴和Z轴组成。其多采用模块化结构,可依据负载位置、大小等选择对应直线运动单元及组合结构形式,可实现实现大物料、重吨位3搬运,采用直角坐标系,编程方便快捷,广泛运用于生产线转运及机床上下料等大批量生产过程。悬臂式搬运机器人其坐标系主要由X轴、Y轴和Z轴组成。其也可随不同的应用采取相应的结构形式。广泛运用于卧式机床、立式机床及特定机床内部和冲压机热处理机床自动上下料。龙门式搬运机器人悬臂式搬运机器人侧壁式搬运机器人其坐标系主要由X轴、Y轴和Z轴组成。其也可随不同的应用采取相应的结构形式。主要运用于立体库类,如档案自动存取、全自动银行保管箱存取系统等。摆臂式搬运机器人其坐标系主要由X轴、Y轴和Z轴组成。Z轴主要是升降,也称为主轴。Y轴的移动主要通过外加滑轨,X轴末端连接控制器,其绕X轴的转动,实现4轴联动。广泛应用于国内外生产厂家,是关节式机器人的理想替代品,但其负载程度相对于关节式机器人小。侧壁式搬运机器人摆臂式搬运机器人4关节式搬运机器人关节式搬运机器人是当今工业产业中常见的机型之一,其拥有5~6个轴,行为动作类似于人的手臂,具有结构紧凑、占地空间小、相对工作空间大、自由度高等特点,适合于几乎任何轨迹或角度的工作。关节式搬运机器人龙门式、悬臂式、侧壁式和摆臂式搬运机器人均在直角式坐标系下作业,其适应范围相对较窄、针对性较强,适合定制专用机来满足特定需求。直角式(桁架式)搬运机器人和关节式机器人在实际运用中都有如下特性:1)能够实时调节动作节拍、移动速率、末端执行器动作状态。2)可更换不同末端执行器以适应物料形状的不同,方便、快捷。3)能够与传送带、移动滑轨等辅助设备集成,实现柔性化生产。4)占地面积相对小、动作空间大,减少厂源限制。5.2搬运机器人的系统组成搬运机器人是一个完整系统。以关节式搬运机器人为例,其工作站主要有操作机、控制系统、搬运系统(气体发生装置、真空发生装置和手爪等)和安全保护装置组成。5搬运机器人系统组成关节式搬运机器人常见的本体有4-6轴。6轴搬运机器人本体部分具有回转、抬臂、前伸、手腕旋转、手腕弯曲和手腕扭转6个独立旋转关节,多数情况下5轴搬运机器人略去手腕旋转这一关节,4轴搬运机器人则略去了手腕旋转和手腕弯曲这两个关节运动。搬运机器人运动轴常见的搬运机器人末端执行器有吸附式、夹钳式和仿人式等。吸附式吸附式末端执行器依据吸力不同可分为气吸附和磁吸附。1)气吸附主要是利用吸盘内压力和大气压之间压力差进行工作,依据压力差分为真空吸盘吸附、气流负压气吸附、挤压排气负压气吸附等。61—橡胶吸盘;2—固定环;3—垫片4—支撑杆;5—螺母;6—基板真空吸盘吸附1—橡胶吸盘;2—心套;3—透气螺钉4—支撑架;5—喷嘴;6—喷嘴套气流负压气吸附利用吸盘变形和拉杆移动改变吸盘内外部压力完成工件吸取和释放动作。通过连接真空发生装置和气体发生装置实现抓取和释放工件,工作时,真空发生装置将吸盘与工件之间的空气吸走使其达到真空状态,此时,吸盘内的大气压小于吸盘外大气压,工件在外部压力的作用下被抓取。利用流体力学原理,通过压缩空气(高压)高速流动带走吸盘内气体(低压)使吸盘内形成负压,同样利用吸盘内外压力差完成取件动作,切断压缩空气随即消除吸盘内负压,完成释放工件动作。71—橡胶吸盘;2—弹簧;3—拉杆挤压排气负压气吸附2)磁吸附利用磁力进行吸取工件,常见的磁力吸盘分为永磁吸盘、电磁吸盘、电永磁吸盘等。1—非导磁体;2—永磁铁;3—磁轭;4—工件永磁吸附1—直流电源;2—激磁线圈;3—工件电磁吸附电永磁吸附是利用永磁磁铁产生磁力,利用激磁线圈对吸力大小进行控制,起到“开、关”作用。磁吸附只能吸附对磁产生感应物体起作用,故对于要求不能有剩磁的工件无法使用,且磁力受高温影响较大,故在高温下工作亦不能选择磁吸附,所以在使用过程中有一定局限性。常适合要求抓取精度不高且在常温下工作的工件。根据被抓取工件形状、大小及抓取部位的不同,爪面形式常有平滑爪面、齿形爪利用磁力线通路的连续性及磁场叠加性而工作,永磁吸盘的磁路为多个磁系,通过磁系之间的相互运动来控制工作磁极面上的磁场强度的强弱进而实现工件的吸附和释放动作。利用内部激磁线圈通直流电后产生磁力,而吸附导磁性工件。8面和柔性爪面。平滑爪面:指爪面光滑平整,多数用来加持已加工好的工件表面,保证加工表面无损伤。齿形爪面:指爪面刻有齿纹,主要目的是增加与加持工件的摩擦力,确保加持稳固可靠,常用于加持表面粗糙毛坯或半成品工件。柔性爪面:内镶有橡胶、泡沫、石棉等物质,起到增加摩擦、保护已加工工件表面、隔热等作用。多用于加持已加工工件、炽热工件、脆性或薄壁工件等。夹钳式:通过手爪的开启闭合实现对工件的夹取,由手爪、驱动机构、传动机构、连接和支承元件组成。多用于负载重、高温、表面质量不高等吸附式无法进行工作的场合。常见手爪前端形状分V型爪、平面型爪、尖型爪等。1)V型爪常用于圆柱形工件,其加持稳固可靠,误差相对较小。2)平面型爪多数用于加持方形工件(至少有两个平行面如方形包装盒等),厚板形或者短小棒料。3)尖型爪常用于加持复杂场合小型工件,避免与周围障碍物相碰撞,也可加持炽热工件,避免搬运机器人本体受到热损伤。V型爪平面型爪尖型爪仿人式仿人式末端执行器是针对特殊外形工件进行抓取的一类手爪,其主要包括柔性手和多指灵巧手。1)柔性手柔性手的抓取是多关节柔性手腕,每个手指有多个关节链组成,有摩擦轮和牵引丝组成,工作时通过一根牵引线收紧另一根牵引线放松实现抓取,其抓取不规则、圆形等轻便工件。2)多指灵巧手多指灵巧手包括多根手指,每根手指都包含3个回转自由度且为独立控制,实现精确操作,广泛应用于核工业、航天工业等高精度作业。9柔性手灵巧手搬运机器人夹钳式、仿人式手爪需要连接相应外部信号控制装置及传感系统,以控制搬运机器人手爪实时的动作状态及力的大小,其手爪驱动方式多为气动、电动和液压驱动,对于轻型和中型的零件采用气动的手爪,对于重型的零件采用液压手爪,对于精度要求高或复杂的场合采用伺候的手爪。依据手爪开启闭合状态的传动装置可分为回转型和移动型。夹钳式手爪常用形式,是通过斜楔、滑槽、连杆、齿轮螺杆或蜗轮蜗杆等机构组合形成,可适时改变传动比以实现对夹持工件不同力的需求。手爪做平面移动或者直线往复移动来实现开启闭合,多用于夹持具有平行面的工件,设计结构相对复杂,应用不如回转型手爪广泛。搬运机器人主要包括机器人和搬运系统组成。机器人由搬运机器人本体及完成搬运路线控制的控制柜组成。而搬运系统中末端执行器主要有吸附式、夹钳式和仿人式等形式。5.3搬运机器人的作业示教搬运机器人主要适应对象为大批量、重复性强或是工件重量较大以及工作环境具有高温、粉尘等条件恶劣情况。特点:定位精确、生产质量稳定、工作节拍可调、运行平稳可靠、维修方便。TCP点确定:10末端执行器不同而设置在不同位置,就吸附式而言其TCP一般设在法兰中心线与吸盘平面交点处;夹钳式其TCP一般设在法兰中心线与手爪前端面交点处。吸盘式TCP生产再现TCP点确定:末端执行器不同而设置在不同位置,就吸附式而言其TCP一般设在法兰中心线与吸盘平面交点处;夹钳式其TCP一般设在法兰中心线与手爪前端面交点处。夹钳式TCP生产再现5.3.1冷加工搬运作业以机加工件搬运为例,选择龙门式(5轴),末端执行器为气吸附,采用在线示教方式为机器人输入搬运作业程序。11搬运运动轨迹图例程序点说明程序点说明吸盘动作程序点说明吸盘动作程序点1机器人原点程序点8搬运中间点吸取程序点2移动中间点程序点9搬运中间点吸取程序点3搬运临近点程序点10搬运作业点放置程序点4搬运作业点吸取程序点11搬运规避点程序点5搬运中间点吸取程序点12移动中间点程序点6搬运中间点吸取程序点13机器人原点程序点7搬运中间点吸取12冷加工搬运机器人作业示教流程5.3.1冷加工搬运作业(1)示教前的准备1)确认自己和机器人之间保持安全距离。2)机器人原点确认。(2)新建作业程序点按示教器的相关菜单或按钮,新建一个作业程序,如“Handle_cold”。(3)程序点的登录示教模式下,手动操作移动龙门搬运机器人轨迹设定程序点1至程序点13,程序点1和程序点13需设置在同一点,可方便编写程序,此外程序点1至程序点13需处于与工件、夹具互不干涉位置。冷加工搬运作业示教程序点示教方法程序点1(机器人原点)•按第3章手动操作机器人要领移动机器人到搬运原点。•插补方式选择“PTP”。程序点2(移动中间点)•确认并保存程序点1为搬运机器人原点。•手动操作搬运机器人到移动中间点,并调整吸盘姿态。•插补方式选择“PTP”。程序点3(搬运临近点)•确认并保存程序点2为搬运机器人作业移动中间点。•手动操作搬运机器人到搬运作业临近点,并调整吸盘姿态。•插补方式选择“PTP”。程序点4(搬运作业点)•确认并保存程序点3为搬运机器人作业临近点。•手动操作搬运机器人移动到搬运起始点且保持吸盘位姿不变。•插补方式选择“直线插补”。•再次确认程序点,保证其为作业起始点。•若有需要可直接输入搬运作业命令。程序点5(搬运中间点)•手动操作搬运机器人到搬运中间点,并适度调整吸盘姿态。•插补方式选择“直线插补”。•确认并保存程序点5为搬运机器人作业中间点。程序点6-9(搬运中间点)•手动操作搬运机器人到搬运中间点,并适度调整吸盘姿态。•插补方式选择“PTP”。•确认并保存程序点6-9为搬运机器人作业中间点。程序点10(搬运作业点)•手动操作搬运机器人移动到搬运终止点且调整吸盘位姿以适合安放工件。•插补方式选择“直线插补”。•再次确认程序点,保证其为作业终止点。•若有需要可直接输入搬运作业命令。13程序点示教方法程序点11(搬运规避点)•手动操作搬运机器人到搬运作业规避点。•插补方式选择“直线插补”。•确认并保存程序点11为搬运机器人作业规避点。程序点12(移动中间点)•手动操作搬运机器人
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 冷俊的熊猫
冷俊的熊猫
本文标题:工业机器人技术及应用(教案)5-搬运机器人及其操作应用
链接地址:https://www.777doc.com/doc-3541713 .html