您好,欢迎访问三七文档
当前位置:首页 > IT计算机/网络 > AI人工智能 > 机器视觉(项目方案设计案例)
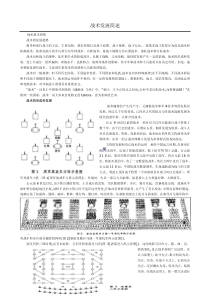
华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例基于视觉的自走车道路识别与自主导航项目名称华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例本项目将利用一套自主设计的基于视觉的自走车系统,在结构化的道路环境中,以一台摄像机作为视觉传感器,通过一台PC机将采集的道路图像做实时处理,识别道路并做出判断,控制自走车沿着车道线直行或转弯。本项目将讨论和比较图像处理的相关算法,并根据实验效果对比分析,提出符合实际的滤波方法和边缘检测方法。在车道线识别上,利用过己知点Hough变换方法提取直线,采用分段识别方法检测弯道线,并采用最小二乘法拟合车道线。将自走车的自主导航分为直线车道线跟踪和弯道的转弯控制两个过程,分别讨论各自的控制方法。项目内容华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例一、概述1、自走车的研究现状和前景2、自走车研究的关键技术3、自走车自主导航技术4、自走车视觉导航技术二、自走车系统结构1、自走车基本功能及系统结构2、视觉导航系统的结构三、道路图像中车道线的提取1、基于哈夫变换的车道线提取算法2、车道线提取效果分析四、自走车自主导航的实现1、基于视觉的直线跟踪2、自走车转弯控制3、自走车自主导航过程五、总结华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例二、自走车系统结构2、视觉导航系统的结构摄像机安装于自走车支架的最高处,其镜头中心大约距离地面××mm,CCD镜头下倾约度××°。电源分为两部分,其中的直流电瓶给摄像头和图像采集卡供电,而计算机由自带电源供电。华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例三、道路图像中车道线的提取华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例四、自走车自主导航的实现华中科技大学机械学院机器视觉及其应用(下)项目方案设计案例五、总结本文研究了一套自主设计的基于视觉的自主导航自走车系统,主要完成了以下工作:1、概述了自走车和计算机视觉技术的研究发展状况,介绍了本文研究的自走车的硬件系统、视觉系统和工作流程。2、用自走车系统实地采集道路图像,阐述当前比较常用的几种经典的道路图像预处理预算法,对实验结果做对比分析,最终提出了符合本自走车实际的二维一次中值滤波算法,不仅提高了算法效率,还达到了理想的滤波效果。3、研究了几种经典的边缘检测算法,结合实验效果,对几种算法做对比,并选择算子作为自走车系统的边缘检测算法。文中还对近年来在边缘检测算法研究上的一些新的成果做了阐述和分析。4、研究道路识别算法,在对几种方法做比较的基础上,确立以识别车道线作为道路识别的方法,采用哈夫变换作为主要的道路检测算法。在弯道车道线的检测上,提出分段检测的方法。最终都基本达到了预期的实验效果。5、在道路信息的检测和提取的基础上,研究自走车识别道路信息并实现自主导航的方法。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 happypisces
happypisces
本文标题:机器视觉(项目方案设计案例)
链接地址:https://www.777doc.com/doc-3857113 .html