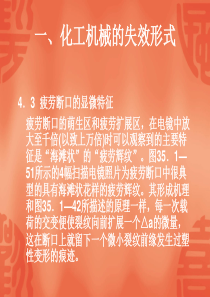
您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 煤矿救灾机器人的实际应用展望
煤矿救灾机器人的研究现状和应用展望1.1选题背景和研究意义煤炭是我国的基础能源,也是国家能源安全的基石。《国务院关于促进煤炭工业健康发展的若干意见》中进一步强调了煤炭工业在国民经济中的重要战略地位,指出了在未来相当长的一段时间内,煤炭仍将是我国的主要能源之一。在我国一次能源生产和消费中始终占70%左右[1]。然而,煤矿开采本身是非常危险的,矿工们暴露在其他职业所不会面临的许多灾害之下。事故的发生可能由各种形式,包括坑顶垮塌、高温高湿、照明不足、火灾、水灾、电梯故障、使用不安全设备以及拖运事故等。这些类型的事故一次可能造成个别矿工的死亡或残废。更危险的事故是由气载尘埃或者瓦斯气体聚集引发的爆炸,那些情况可能立即造成数十名甚至数百名矿工的死亡[3]。矚慫润厲钐瘗睞枥庑赖。几十年来,煤矿生产安全一直面临着严峻考验,矿难事故在世界各地都扮演着矿工杀手的角色:2006年9月,印度中东部恰尔肯德邦一座煤矿发生瓦斯泄漏爆炸,造成54名矿工死亡。2007年11月,乌克兰顿涅茨克州的扎夏德科煤矿发生瓦斯爆炸,酿成乌克兰1991年独立以来最严重的一场矿难,事故死亡人数达80人,另有20名矿工下落不明。聞創沟燴鐺險爱氇谴净。2009年11月21日,中国黑龙江省鹤岗市新兴煤矿发生特别重大瓦斯爆炸事故,该事故共造成108人死亡,成为当年震惊世界的特大灾难。残骛楼諍锩瀨濟溆塹籟。2010年4月,美国西弗吉尼亚州一座煤矿发生爆炸,造成25人死亡,4人失踪,这是自1984年以来美国发生的最严重的矿难。酽锕极額閉镇桧猪訣锥。2010年5月,俄罗斯西伯利亚克麦罗沃州“拉斯巴茨卡亚”煤矿发生爆炸,矿难造成66人死亡,24人失踪。彈贸摄尔霁毙攬砖卤庑。2010年11月19日,新西兰最大的煤矿派克河煤矿发生爆炸事故,被困29名矿工无人生还,这是新西兰近一个世纪以来发生的最严重的矿难。謀荞抟箧飆鐸怼类蒋薔。世界煤炭工业史上最惨痛的矿难发生在1942年4月26日的日本本溪湖煤矿,总共查实死亡人数为1549人,轻重伤246人。在死亡人员中有31名日本人,其余都是中国人。厦礴恳蹒骈時盡继價骚。尽管煤矿开采是个高危行业,职业死亡事故的发生率很高,但是在过去的100多年里,世界煤炭产业还是通过努力显著降低了死亡人数和死亡率。其结果是,在绝大多数煤炭生产国,职业危险已经大大减少。表1-1显示了几个主要煤炭生产国每百万吨煤炭产量的死亡率。可以看出,尽管中国的煤炭生产安全情况已经得到改善,但其总体情况仍然是世界上最糟糕的。茕桢广鳓鯡选块网羈泪。统计显示,2009年,全国煤矿发生事故1800多起、死亡2631人,平均每天发生5起、死亡7.2人图1.1我国2000—2009年煤矿事故死亡人数及百万吨死亡率图1.2我国1976—2009年煤炭产量与事故死亡总人数国别1980年1990年1995年2000年2008年美国0.170.070.050.0270.028印度1.430.540.600.420.32俄罗斯1.070.960.850.460.41澳大利亚0.370.040.020南非0.230.160.13波兰0.660.520.170.230.25英国0.330.200.10中国8.35.215.035.771.18表1-1世界各国近30年来煤矿百万吨死亡率我国严重的煤矿安全生产现状在国内外造成严重影响和全社会的关注,严重损害了我国的国际形象。1.2煤矿救灾机器人的研究现状世界上许多国家都在研制军用机器人、扫雷机器人、排爆机器人和消防机器人等危险作业机器人。救灾机器人是机器人的1个新兴发展领域,属于危险作业机器人的1个分支,具有危险作业机器人的特点鹅娅尽損鹌惨歷茏鴛賴。煤矿救灾机器人是指代替人到不能去或者不适宜去的危险的事故矿井环境中,通过远程操作直接在现场进行侦察、探测和执行搜救任务,并将井下环境情况,人员生存情况反馈给地面搜救人员的机器人。籟丛妈羥为贍偾蛏练淨。1.2.1国外研究现状在国外,煤矿救灾机器人发展迅速,技术日益成熟,并进入实用化阶段,日本、美国、澳大利亚、英国等已开始装备使用。預頌圣鉉儐歲龈讶骅籴。对于矿井救灾机器人的研究工作,美国起步较早,已有多家高校或研究机构研发了针对不同用途的矿井救灾机器人。如美国智能系统和机器人中心开发的RATLER矿井探索机器人(图1.3),用于灾难后的现场侦查工作,采用电传遥控方式,有主动红外摄像机、无线射频信号收发器、陀螺仪和危险气体传感器等装备。无线遥控距离(直线距离)约76m。这种机器人已经形成系列化,除了矿井方面的应用,还有军事方面的应用。渗釤呛俨匀谔鱉调硯錦。图1.3theRATLER™©2010ISRC美国南佛罗里达大学研制的Sim2bot矿井搜索机器人,这种机器人小巧灵活,携带数字低照度摄像机和基本气体监视组件,可以通过一个钻出的小洞钻进矿井,越过碎石和烂泥,并使用其携带的传感器发现受害矿工,探测氧气、甲烷气体含量,生成矿井地图。另外,卡内基梅隆大学机器人研究中心也开发了2款全自主矿井探测机器人-Groundhog和Ferret。Groundhog主要用于探测井下环境,精确绘制井下立体地图。机械结构采用四轮导向、液压驱动,可实现零半径转弯,最高速度可达10kmPh。装备有激光测距传感器、夜视摄像机、气体探测传感器、sinkage传感器、陀螺仪等,能够对矿井下的环境进行综合性测量,建立矿井立体模型。机器人雪貂用于矿井钻孔探测,装备有长距离低反射率三维激光扫描仪、嵌入式微处理器、磁指南针、倾角传感器、活动云台摄像机、照明灯、接近传感器等设备。能够完成三维激光扫描地图生成,地图核对,可通过性分析等任务,一次充电可连续工作4h。铙誅卧泻噦圣骋贶頂廡。Remotec公司制造的V2煤矿救援机器人(图1.4),大约50英寸高,1200英磅重,使用防爆电动机驱动橡皮履带。安装有导航和监控摄像机、灯、气体传感器和一个机器臂,具有夜视能力和2路语音通讯功能。可在5000英尺以外的安全位置远程遥控,使用光纤通讯传送矿井环境信息,操纵者能够看到实时视频信息和易燃的有毒气体的浓度。擁締凤袜备訊顎轮烂蔷。图1.4ANDROSWolverineRobot(V2)©Remotec,Inc.美国桑迪亚实验室新一代Gemini-Scout搜救机器人(图1.5)于2010年研制成功,并有可能于2011全面投产。该机器人装备了双向通信收音机,红外摄像机,气体传感器,泛倾斜照相机,通过远程控制可以对矿井下危险环境作出准确评估。这款机器人体积约4英寸,行动灵活,可以涉过18英寸的水深,轻松越过碎岩和大石块等障碍,将食物,氧气包,药物提供给生存的矿工。由于这款机器人进行了承受爆炸和淹水隧道的环境设计,这将使其应用范围大大增加。值得一提的是,桑迪亚的工程师采用了XBOX360游戏控制器来操作双子星的系统,确保了操作界面的友好和新用户能尽快适应。贓熱俣阃歲匱阊邺镓騷。图1.5GeminiScoutRobotNIOSH(美国国家职业安全与卫生研究院)同时也在评估一款由雷神公司开发的多维蛇形移动机器人,将来可能和GeminiScoutRobot一起投入使用。坛摶乡囂忏蒌鍥铃氈淚。1.2.2国内研究现状国内研究矿井救灾机器人的工作相对较晚,研究机构也相对较少,中国矿业大学较早开始了煤矿救灾机器人的研制工作,经过几年努力已经取得了卓有成效的进展。另外,沈阳新松机器人自动化有限公司和唐山开诚电控集团也于2009年研制出了相关井下探测救援机器人。蜡變黲癟報伥铉锚鈰赘。中国矿业大学可靠性工程与救灾机器人研究所于2006年6月成功研制了我国第1台用于煤矿救援的CUMT-1型矿井搜救机器人(图1.6),该机器人装备有低照度摄像机、气体传感器和温度计等设备。能够探测灾害环境,实时传回灾区的瓦斯、CO、粉尘浓度和温度以及高分辨率的现场图像等信息;具有双向语音对讲功能,能够使救灾指挥人员与受害者进行快速联络,指挥受伤人员选择最佳的逃生路线;具有无线网络通讯功能;同时还携带有食品、水、药品、救护工具等救助物资,使受害者能够积极开展自救。買鲷鴯譖昙膚遙闫撷凄。图1.6CUMT-1型矿井搜救机器人上述矿井搜救机器人代表了当前国内外在该领域的研究现状和发展水平,但它们离实际应用的要求还有很大距离。例如,RATLER矿井探索机器人的通讯方式单一,通讯距离短;机械结构方面,其原型设计是基于野外全地形运动车辆的使用要求,没有按照适合于矿井环境来设计运动系统,底盘较低,越障性能一般。由于采用轮式差速转弯,转弯半径大,转向不灵活,结构不太适合于巷道等狭窄空间,且没有任何自主避障方面的设计。Simbot是一种体积非常小的机器人,这就决定了它不可能拥有较远的控制范围,只能在较近的范围内进行有线控制,携带的传感器数量也很有限,必须由搜索队员携带下井,使用方式非常有限。Groundhog机器人的自主性和移动性都非常强,但它是为了探测正常矿井地形而设计的试验平台,携带有非常多的仪器设备,由于美国的矿井巷道比较宽敞,道路平坦,瓦斯含量少,条件比较优越,所以其设计的体积巨大,并不适合用作煤矿搜救,曾经陷入泥浆地,被用线缆拉了出来。V2机器人是比较成熟的一款矿井救灾机器人,结构设计很好,但体积略显巨大,而且也没有自主避障功能,仅仅是遥控而已,并且只有光纤一种通讯方式,其可靠性也有待提高。CUMT-1型矿井搜救机器人同样存在通讯、避障和机械可靠性等方面的技术问题。国内研究现状綾镝鯛駕櫬鹕踪韦辚糴。1.3煤矿救灾机器人的应用1.3.1西弗吉尼亚矿难救援中的应用2006年年初,美国西弗吉尼亚Sago煤矿发生矿难,造成12名矿工死亡。事故发生后,救援人员使用GPS测定被困矿工的方位,然后从地面上钻了3个深孔,以便给井下输送氧气,同时期望对井下的状况进行检测。救援人员分别放入空气探测仪和摄像头,但均无功而返。为了从水平方向对井下情况进行探测,美国劳工部矿业安全与卫生局通过深孔向井下派出了一个救援机器人,这是搜救机器人被第一次用于矿难的救援,但最终因机器人中途行进过程中陷入泥潭而受阻。驅踬髏彦浃绥譎饴憂锦。1.3.2新西兰矿难救援中的应用图1.7新西兰用于搜救的机器人2010年11月19日下午4点左右,位于新西兰南岛西部阿塔劳的派克河煤矿发生瓦斯爆炸事故,29名矿工被困井下。猫虿驢绘燈鮒诛髅貺庑。由新西兰国防部提供的一个机器人经过改装,曾于11月22日下井,打算对矿井内的情况进行“摸底”,勘测矿井巷道是否通畅,搜集井下空气样本,并试图和被困人员取得联系。改装目的是为避免这台高科技设备在下井过程中产生火花、引发瓦斯爆炸。锹籁饗迳琐筆襖鸥娅薔。而很不幸的是,这台搜救机器人在水中行走了550米就发生了短路——不到它的设计行程的四分之一。新西兰政府只好向美国和澳大利亚寻求更先进的机器人的帮助。構氽頑黉碩饨荠龈话骛。11月24日下午,新西兰派克河煤矿发生第二次爆炸,29名5天前被困的矿工已经几乎没有生还希望。“想让任何机器人工作在不是专门为他们设计的环境中是几乎不可能成功的——我们仍在探寻井下救灾到底需要什么。”来自德克萨斯A&M大学的救援机器人专家RobinMurphy说。輒峄陽檉簖疖網儂號泶。从以上两个例子来看,应用机器人进行井下搜救工作面临诸多难题,恶劣的井下环境(黑暗,潮湿,冰冷)很容易造成机器人发生问题:短路,传感器失效,卡住等等。尧侧閆繭絳闕绚勵蜆贅。发达国家虽然用煤矿救灾机器人协助过救灾工作,但是效果并不明显。而在我国,煤矿救灾机器人从未经受过实践的考验,几年来一直停留在理论和样机阶段,因此我国并没有应用救灾机器人进行矿难事故救援的记录。识饒鎂錕缢灩筧嚌俨淒。事实上,几乎所有的煤矿救灾机器人都并非为井下独立设计,而是由其他救灾机器人(军用机器人和排爆机器人)稍作改进而来。而这种借鉴而来的设计并不能适应煤矿特殊的工作环境。凍鈹鋨劳臘锴痫婦胫籴。目前来看,发达国家和我国研制煤矿救灾机器人也仅局限于煤矿探测和搜索机器人领域(最多能够带点食物等少量物资),并没有能力真正在“救人”领域取得突破。恥諤銪灭萦欢煬鞏鹜錦。由此可见,煤矿救
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码







 jfl100
jfl100
本文标题:煤矿救灾机器人的实际应用展望
链接地址:https://www.777doc.com/doc-3949226 .html