您好,欢迎访问三七文档
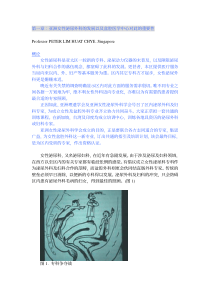
机器人机械结构内容简介•机器人系统组成•相关术语及性能指标•机械手•机器人运动机构•移动机器人机器人系统组成•如图所示,机器人由机械部分、传感部分、控制部分三大部分组成。这三大部分可分成驱动系统、机械结构系统、感受系统、机器人一环境交互系统、人机交互系统、控制系统六个子系统。机器人系统组成•驱动系统要使机器人运行起来,需给各个关节即每个运动自由度安置传动装置,这就是驱动系统.•感受系统它由内部传感器模块和外部传感器模块组成,获取内部和外部环境状态中有意义的信息.智能传感器的使用提高了机器人的机动性、适应性和智能化的水准.人类的感受系统对感知外部世界信息是极其灵巧的,然而,对于一些特殊的信息,传感器比人类的感受系统更有效.•机器人一环境交互系统是实现机器人与外部环境中的设备相互联系和协调的系统.机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。人一机交互系统是人与机器人进行联系和参与机器人控制的装置:指令给定装置和信息显示装置.机器人系统组成•控制系统控制系统的任务是根据机器人的作业指令程序以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能.如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统.根据控制原理可分为程序控制系统,适应性控制系统和人工智能控制系统.根据控制运动的形式可分为点位控制和连续轨迹控制。机器人系统组成相关术语及性能指标关节(Joint):即运动副,允许机器人手臂各零件之间发生相对运动的机构。连杆(Link):机器人手臂上被相邻两关节分开的部分。自由度(Degreeoffreedom):或者称坐标轴数,是指描述物体运动所需要的独立坐标数。手指的开、合,以及手指关节的自由度一般不包括在内。刚度(Stiffness):机身或臂部在外力作用下抵抗变形的能力。它是用外力和在外力作用方向上的变形量(位移)之比来度量。相关术语及性能指标定位精度(Positioningaccuracy):指机器人末端参考点实际到达的位置与所需要到达的理想位置之间的差距。重复性(Repeatability)或重复精度:在相同的位置指令下,机器人连续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。工作空间(Workingspace):机器人手腕参考点或末端操作器安装点(不包括末端操作器)所能到达的所有空间区域,一般不包括末端操作器本身所能到达的区域。相关术语及性能指标机械手机械手的操作动作•机械手的动作形态是由三种不同的单动作——旋转、回转、伸缩组合而成的。•旋转和回转是指运动机构产生相对运动。旋转是转动部件的轴线和转动轴同轴;回转是转动部件的轴线与转动轴不同轴。•伸缩是指运动机构产生直线运动。根据单元动作组合方式的不同,机械手的动作形态一般归纳为以下四种坐标类型:①直角坐标型②圆柱坐标型③极坐标型④多关节型。•直角坐标型机械手可以在三个互相垂直的方向上作直线伸缩运动,这类机械手各个方向的运动是独立的,计算和控制比较方便,但占地面积大,限于特定的应用场合。机械手•圆柱坐标型机械手有一个围绕基座轴的旋转运动和两个在相互垂直方向上的直线伸缩运动。它适用于采用油压(或气压)驱动机构,在操作对象位于机器人四周的情况下,操作最为方便。•极坐标型机械手的动作形态包括围绕基座轴的旋转,一个回转和一个直线伸缩运动,其特点类似于圆柱型机械手。机械手•多关节型机械手最接近于人臂的构造。它主要由多个回转或旋转关节所组成,一般都采用电机驱动机构。运用不同的关节连接方式,可以完成各种复杂的操作。由于具有占地面积小,动作范围大,空间移动速度快而灵活等特点,多关节型机械手在各种智能机器人中被广为采用。机械手PUMA一262机器人机构机器人运动机构•上图是PUMA系列一种较小的机器人PUMA一262机器人机构(操作机)的外形直观图。它有一个立柱,可以垂直回转,称作腰关节,也称1轴。有大臂、小臂,它们的回转轴称作肩关节(2轴)和肘关节(3轴)。这3个轴和杆,构成了该机器人的位置机构(又称主关节轴组),即由他们的几何参数(杆长和偏距)和运动参数(关节轴的转角)决定手腕(参考点)的空间活动范围(工作空间)。手腕具有3个互相垂直的回转轴(4、5、6轴),它们是姿态机构(又称副关节轴组),即它们的转角确定着工具(图中未画)的空间姿态。•PUMA262型机器人具有六个自由度,可以进行复杂空间曲面的弧焊作业。机器人运动机构•6个关节轴由6个独立的电机驱动,由图可以看出,电机1通过两对齿轮传动带动立柱回转;电机2通过联轴器、一对圆锥齿轮和一对圆柱齿轮带动齿轮Z,齿轮Z绕与立柱固联的齿轮Z转动,于是形成了大臂相对于立柱的回转运动;电机3通过两个联轴器和一对圆锥齿轮、两对圆柱齿轮驱动小臂相对于大臂回转;电机4先通过一对圆柱齿轮、两个联轴器和另一对圆柱齿轮驱动手腕相对于小臂回转;电机5通过联轴器、一对圆柱齿轮、一对圆锥齿轮驱动手腕相对于小臂摆动;电机6通过联轴器、两对圆锥齿轮和一对圆柱齿轮驱动机器人的机械接口相对于手腕的球壳回转。机器人运动机构车轮型移动机器人两轮型三轮型四轮型履带式救援机器人移动机器人步行式移动机器人其它移动方式军用昆虫机器人爬缆索机器人水下6000米无缆自治机器人蛇形机器人移动机器人
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 sylcyzt
sylcyzt
本文标题:机器人机械结构介绍
链接地址:https://www.777doc.com/doc-3998037 .html