您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 企业财务 > CASIOfx-5800p经典实用测量程序
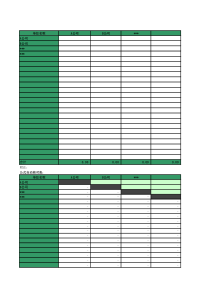
fx-5800P程序单一闭附合图根水准路线近似平差计算程序(PM3-6)(1)计算原理单一闭附合图根水准路线近似平差的原理是,将高差闭合差反号、按测段路线长或测站数比例分配计算各水准测段的高差改正数,并据此计算出未知点的高程。(2)程序——PM3-6,占用内存544字节。CLOSEDOrCONNECTINGMAPPINGLEVELPM3-6显示程序标题LEVELTYPE,PLATE(1)=?P输入水准路线类型数字,1代表平坦,其余数代表山地STARTH(m)=?A输入起点已知高程ENDH(m)=?B输入终点已知高程,闭合水准路线时为起点已知高程ClrStat:FreqOn基本设置HEIGHTNUM=?N输入测段高差数NDimZ定义额外数组变量用于存储平差后点的高程0X:0Y累加高差,路线长变量清零For1IToNn=:I显示测段号h(m)=?ListX[I]输入测段高差L(km)Orn=?ListY[I]输入测段路线长或测站数ListX[I]+XX:ListY[I]+YY累加路线长与高差NextA+X-BF计算高差闭合差IfP=1:Then0.04(Y)W:Else0.012(Y)W:IfEnd图根水准高差闭合差限差HCLOSEERROR(MM)=:1000F显示高差闭合差Σ(L)kmOrΣ(n)=Y显示总路线长或总测站数IfAbs(F)W:ThenCLOSEERROROVER.:IfEnd显示高差闭合差超限-F÷YV计算每km或每站高差改正数For1IToNListX[I]+VListY[I]ListFreq[I]计算改正后的测段高差IfI=1:ThenA+ListFreq[I]Z[I]:ElseZ[I-1]+ListFreq[I]Z[I]:IfEndn=:I显示测段号hADJUST(m)=:ListFreq[I]显示改正后的测段高差HnADJUST(m)=:Z[I]显示改正后点的高程NextCLOSETEST(mm)=:1000(Z[I]-B)显示高程检核结果PM3-6END(3)程序说明程序先提示用户输入水准路线类型,按键为平坦路线,要求其后输入以km为单位的水准测段路线长;按其余数字键与键为山地水准路线,要求其后输入水准测段测站数。提示用户输入起点已知高程与终点已知高程,当为闭合水准路线时,输入的终点高程应等于起点高程。提示用户输入水准测段数,按从起点到终点方向的顺序分别输入测段高差与路线长(或测站数),并分别显示以mm为单位的高差闭合差、以km为单位的总路线长(或总测站数)。当闭合差超限时,程序给出提示CLOSEERROROVER.,并继续计算。程序按从起点到终点方向的顺序分别显示测段高差平差值、未知点高程值及检核计算结果。图3-6为按图根水准测量要求施测的某附合水准路线观测成果略图。BM-A和BM-B为已知高程水准点,图中箭头表示水准测量前进方向,路线上方的数字为测得的测段高差(m),路线下方数字为该段路线的长度(km),试用近似平差法计算待定点1,2,3点的高程。(km)观测高差ih(m)改正数iV(m)改正后高差ihˆ(m)高程H(m)BM-A45.2861.6+2.331-0.0082.323147.6092.1+2.813-0.0112.802250.4111.7-2.244-0.008-2.252348.159BM-B2.0+1.430-0.010+1.42049.579Σ7.4-0.037执行程序PM3-6,计算图3-6附合水准路线未知点高程的屏幕提示与用户操作过程如下:屏幕提示按键说明CLOSEDOrCONNECTINGMAPPINGLEVELPM3-6显示程序标题LEVELTYPE,PLATE(1)=?1输入水准路线类型数字STARTH(m)=?45.286输入起点已知高程ENDH(m)=?49.579输入终点已知高程hNUM=?4输入测段数n=1提示第1测段输入数据h(m)=?2.331输入第1测段高差L(km)Orn=?1.6输入第1测段路线长n=2提示第2测段输入数据h(m)=?2.813输入第2测段高差L(km)Orn=?2.1输入第2测段路线长n=3提示第3测段输入数据h(m)=?-2.244输入第3测段高差L(km)Orn=?1.7输入第3测段路线长n=4提示第4测段输入数据h(m)=?1.43输入第4测段高差L(km)Orn=?2输入第4测段路线长hCLOSEERROR(mm)=37显示高差闭合差Σ(L)kmOrΣ(n)=7.4显示路线长或总测站数n=1显示1点数据hADJUST(m)=2.323显示第1测段平差后高差HnADJUST(m)=47.609显示1点平差后高程n=2显示2点数据hADJUST(m)=2.803显示第2测段平差后高差HnADJUST(m)=50.412显示2点平差后高程n=3显示3点数据hADJUST(m)=-2.253显示第3测段平差后高差HnADJUST(m)=48.159显示3点平差后高程n=4显示4点数据hADJUST(m)=1.420显示第4测段平差后高差图3-6附合水准路线略图(m)=49.579显示检核点高程CLOSETEST(mm)=0.000高差闭合差检核结果PM3-6END程序运行结束显示(2)主程序——PM3-4,占用内存842字节。ANGLERESECTIONPM3-4显示程序标题Fix3:Deg:ClrStat:FreqOn基本设置XA(m)=?A:AListX[1]输入已知点A的X坐标YA(m)=?B:BListY[1]输入已知点A的Y坐标XB(m)=?C:CListX[2]输入已知点B的X坐标YB(m)=?D:DListY[2]输入已知点B的Y坐标XC(m)=?E:EListX[3]输入已知点C的X坐标YC(m)=?F:FListY[3]输入已知点C的Y坐标Norm1:DPOINTYES(1)OrNO(0)?Z是否有检查点Fix3IfZ=1:ThenXD(m)=?G:GListX[4]输入已知点D的X坐标YD(m)=?H:HListY[4]:IfEnd输入已知点D的Y坐标5DimZ定义额外数组变量ANGLEA(Deg)=?ListFreq[1]输入角AANGLEB(Deg)=?ListFreq[2]输入角BANGLEC(Deg)=?ListFreq[3]输入角CIfZ=1:ThenCHECKANGLED(Deg)=?ListFreq[4]:IfEnd有D点坐标输入θ角1O:2P:3Q为调子程序计算∠A准备ProgANGLE调子程序计算∠A∠A(DMS)=:V显示∠A1÷(tan(V)-1-tan(ListFreq[1])-1)Z[1]计算AP2O:3P:1Q为调子程序计算∠B准备ProgANGLE调子程序计算∠B∠B(DMS)=:V显示∠B1÷(tan(V)-1-tan(ListFreq[2])-1)Z[2]计算BP3O:1P:2Q为调子程序计算∠C准备ProgANGLE调子程序计算∠C∠C(DMS)=:V显示∠C1÷(tan(V)-1-tan(ListFreq[3])-1)Z[3]计算CP(Z[1]ListX[1]+Z[2]ListX[2]+Z[3]ListX[3])÷(Z[1]+Z[2]+Z[3])X计算交会点坐标(Z[1]ListY[1]+Z[2]ListY[2]+Z[3]ListY[3])÷(Z[1]+Z[2]+Z[3])YXP(m)=:X显示交会点坐标YP(m)=:YIfZ=1:ThenXListX[5]:YListY[5]如果观测了检查角5O:3P:4Q为调子程序计算检查角准备ProgANGLE调子程序计算检查角∠CHECK(DMS)=:V显示计算的检查角ListFreq[4]-VK计算检查角观测值与计算值之差CHECKANGLEERROR(DMS)=:K显示检查角差ElseNOCHECKANGLE.:IfEnd显示没有观测检查角PM3-4END(3)子程序——ANGLE,占用内存172字节。Pol(ListX[P]-ListX[O],ListY[P]-ListY[O]):Cls:ElseJR:IfEnd计算O→P方向的方位角Pol(ListX[Q]-ListX[O],ListY[Q]-ListY[O]):ClsIfJ0:ThenJ+360S:ElseJS:IfEnd计算O→Q方向的方位角R-SV计算方位角差IfV0:ThenV+360V:IfEndReturn返回主程序(4)程序说明程序显示完计算标题后,先提示用户输入A,B,C点的已知坐标,然后提示是否观测了检查角θ,若观测了检查角θ,则提示输入D点的坐标,否则不提示输入D点的坐标。观测数据输入时,要求必须输入α,β,γ角,若观测了检查角θ则应输入检查角,否则,不需要输入检查角。完成已知数据与观测数据输入后,屏幕显示计算出的A∠,B∠,C∠及后方交会点P的坐标,若有检查角θ,还将显示根据坐标反算出的检查角及其与观测角的差。交会点P的坐标存储在字母变量寄存器X,Y中,表3-3为图3-4的计算结果。表3-5使用程序PM3-4计算测角后方交会点的成果点名x坐标(m)y坐标(m)角名水平角顶角计算值A2502.9325044.009α78°12′17″∠A41°01′26.93″B3229.4165185.604β161°05′58″∠B87°47′23.94″C3325.0064569.476γ120°41′45″∠C51°11′09.13″D2724.7014416.400θ71°10′24″P2896.7634906.241θ′71°10′23.77″差0°00′0.23″执行程序PM3-4,屏幕提示与用户操作过程如下:屏幕提示按键说明ANGLERESECTIONPM3-4显示程序标题XA(m)=?2502.932输入A点的x坐标YA(m)=?5044.009输入A点的y坐标XB(m)=?3229.416输入B点的x坐标YB(m)=?5185.604输入B点的y坐标XC(m)=?3325.006输入C点的x坐标YC(m)=?4569.476输入C点的y坐标DPOINTYES(1)OrNO(0)=?1是否观测了检查点DXD(m)=?2724.701输入D点的x坐标YD(m)=?4416.4输入D点的y坐标ANGLEA(Deg)=?781217输入水平角αANGLEB(Deg)=?161558输入水平角βANGLEC(Deg)=?1204145输入水平角γCHECKANGLED(Deg)=?711024输入检查角θA(DMS)=41°1∠′26.93″显示计算出的∠AB(DMS)=87°47∠′23.94″显示计算出的∠BC(DM∠S)=51°11′9.13″显示计算出的∠CXP(m)=2896.763显示P点的x坐标YP(m)=4906.241显示P点的y坐标CHECK(DMS)=71°10∠′23.77″显示计算出的检查角CHECKANGLEERROR(DMS)=0°0′0.23″显示检查角差PM3-4END程序运行结束显示程序测角前方交会坐标计算程序(PM3-3)(2)程序PM3-3,占用内存506字节。FORWARDINTERSECTIONPM3-3显示程序标题Fix3:Deg基本设置XA(m)=?A:YA(m)=?B输入已知点A的坐标XB(m)=?C:YB(m)=?D输入已知点B的坐标Norm1:CPOINTYES(1)OrNO(0)=?Z是否有检查点Fix3IfZ=1:ThenXC(m)=?E:
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 yuanna3
yuanna3
本文标题:CASIOfx-5800p经典实用测量程序
链接地址:https://www.777doc.com/doc-4369954 .html