您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 信息化管理 > 游梁式抽油机悬点载荷的动态响应分析(zuixin)
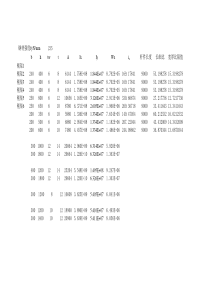
游梁式抽油机悬点载荷的动态响应分析孙振华,田学民中国石油大学(华东),信息与控制学院,257061第一作者简介:孙振华,男,高级工程师,出生于1971年10月10日,1993年7月毕业于石油大学(华东)自动化系,2002年7月获得上海交通大学机械工程硕士学位,现为中国石油大学2006级在读博士(全日制)。通讯地址:山东省东营市北二路271号自动化馆北楼201室,邮编:257061;邮箱:sunnyforqu2000@yahoo.com.cn;电话:0546-8395727摘要本文针对以波动方程为基础的抽油机井悬点示功图仿真分析方法中计算量大、对参数的敏感性强等系统动态分析不利因素,建立了简化的基于系统动态响应分析的动态模型。该模型结合实际抽油机悬点示功图中抽油杆的振动规律是一个近似二阶振荡这一特点,通过精确的抽油机井下系统的动力学分析,将抽油杆的运动分为四个阶段,在主要的第二、第四阶段建立系统的动态响应模型。对某抽油机系统的仿真结果表明,本文建立的模型能够较好地反映现场的实际情况。关键词游梁式抽油机悬点载荷动态响应分析DynamicResponseAnalysistothePolished-RodLoadofBeam-PumpingUnitAbstract:Aimedatthedisadvantagesofthewaveequationanalyzingmethodinaspectsofcomplicatedcalculationandparameterssensibility,thisarticleestablishedadynamicresponsemodelforthePumpingUnitSystemthroughexplicitkinematicalanalysiscombinedwiththesecondorderoscillatingidentityofthesystem.ThemodelwasusedtoformthetransientloadequilibriumequationsofthePolished-Rodinitssecondandforthofthefourmovingstages.Simulationgivesgoodsimilaritybetweentheresultsfromthemodelandthefield.KeyWords:Beam-PumpingUnit,Polished-RodLoad,DynamicResponseAnalysis引言有杆泵采油是目前石油开采工艺中的主力方法之一[1],目前其生产状况的动态监控主要采用示功图分析方法,但是大多数示功图分析方法都是静态的,如专家系统[2]、矩特征法[3]、神经网络分析法[4]等,忽略了系统的动态响应特性。以波动方程为基础的抽油机井悬点示功图仿真分析方法[5][6]为系统的精细描述提供了强有力的工具,但是它的计算量大,对系统的基础数据准确度要求较高,因此目前主要用于抽油机系统的优化设计,对于系统实时动态分析方面的应用仍然受到限制。实际上,抽油机运动有很强的规律性,抽油杆可以看作是一个近似二阶系统。因此本文对于来自井下的激励响应可以通过二阶系统响应函数加以描述,建立了游梁式抽油机悬点载荷的动态响应分析模型。模型中把影响抽油杆动态响应的因素分为两个主要参数,即系统阻尼系数和系统圆频率n,和n同系统摩擦以及泵载荷的大小直接相关,因此通过分析和n的值即可得到系统摩擦以及泵载荷的变化规律,大大简化了系统分析方法,为系统的实时动态分析提供了一个有用的思路。抽油机井下系统动力学分析分析系统井下运动规律,文献[7]将油管未锚定情况下的抽油机运动在一个周期内分为四个连续工作状态:(1)上行程开始时抽油杆和未锚定油管持续拉伸变形阶段;(2)并行基本结束后的上行程阶段;(3)下行程开始时抽油杆和未锚定油管变形持续恢复阶段;(4)变形基本恢复后的下行程阶段。在油管锚定的情况,抽油杆柱的运动也大致可分为四个阶段:第一阶段:悬点开始上行,泵柱塞由于惯性继续下行到最低点;第二阶段:悬点上行过程中,泵柱塞也开始上行,到悬点达到上行程死点;第三阶段:悬点开始下行,泵柱塞继续上行到最高点;第四阶段:悬点下行过程中,泵柱塞也开始下行,到悬点达到下行程死点。在第一、四阶段,当出现抽油杆下行阻力过大而引起抽油杆杆柱扭曲变形时,可以再将各阶段单独细分,这里仅讨论理想情况。抽油杆运行的每个阶段内,系统相对稳定,悬点负荷的变化是位移、速度、加速度和载荷激励的函数。第一阶段和第三阶段,为基本变形建立阶段,是由于柱塞的惯性作用或抽油杆的弹性收缩而引起,一般时间较短。第二阶段和第四阶段,为系统对激励的动态响应阶段,是系统的主要表现阶段。抽油杆悬点泵挂点油管泵筒抽油杆悬点泵挂点油管泵筒抽油杆悬点泵挂点油管泵筒第一阶段第二阶段抽油杆悬点泵挂点油管泵筒第四阶段第三阶段图1系统运动一个周期内的四个阶段在油管锚定情况下,不考虑油管变形带来的影响,分析不同阶段抽油杆悬点受力。1第一阶段抽油杆上端由于受悬点的约束被游梁强制上行,而抽油杆下端部即泵柱塞由于惯性以及抽油杆的拉伸作用继续保持下行,此时泵的游动阀处于打开位置,固定阀处于关闭位置,抽油杆和柱塞相当于在一个充满液体的容器里移动,抽油杆仅受拉力、重力、浮力和摩擦力的作用。这一阶段,悬点加载质量中包含抽油杆惯性质量rmm,到泵柱塞移动前它达到最大值rm,模型是一个垂直上提的连续杆,分析悬点受力可以得到悬点力平衡方程:1lsrrmprfrflFmgmatFtF(1)式中,g代表重力加速度,prat为悬点加速度,flF为抽油杆受到的浮力,在该阶段近似为常数:1flFconst。惯性质量可以近似表达为:11,0rmrsstmmtTT,其中—影响因次,根据抽油杆材料和级数调整。frFt为系统摩擦力,它同抽油杆的速度梯度有关,可由下式求得:_1(),nfrprprrfiiiFtfvtfvxt,式中prf为光杆摩擦阻尼系数;_rfif为第i节抽油杆同液柱之间的滑动摩擦阻尼系数,这里假设总杆柱共有n节抽油杆;,ivxt是第i级抽油杆等效运动速度,自上而下,有以下关系:,iprnivxtvtn,1,prvxtvt,prvt代表悬点瞬时速度。2第二阶段泵柱塞随抽油杆一同开始向上运动,此时液柱质量加载,游动阀关闭,泵底固定阀打开,柱塞力平衡方程:rpppptprpppbpFmatgptSSfvtptS(2)式中,rpF为柱塞受到的抽油杆拉力;pS为柱塞有效截面积;pm为柱塞质量;pistonvt为柱塞垂直速度;pat为柱塞垂直加速度;pf为柱塞与泵筒之间的摩擦系数;ptfltfflpwhptgHmatpt为柱塞上端液柱压力,fl代表油管内液体密度;tfH代表油管内液柱垂直高度;whpt代表井口回压;2pipbpiprflppSptPkvtS代表柱塞下端所受液体动态压力,它同柱塞上行速度、泵进口压力以及流体井下密度有关,prk为抽油泵入口流阻系数;fl为流体井下密度;piS为泵入口流道有效截面积;piP为泵入口压力,同套管压力和动液面有关,在一个周期内近似为常数。分析式(2),一般认为悬点在第二阶段运行较为稳定,近似为匀速,泵载荷的加入相当于在抽油杆系统上施加了一个阶跃激励,在第二阶段,抽油杆悬点载荷对泵负荷激励的响应表现为一个振荡环节,其传递函数具有如下形式:2222nnnKGsss,ensKm为系统无阻尼圆频率;2psefmK为系统相对阻尼系数;K为系统开环增益,此处为1;eK为抽油杆垂直方向上的等效弹簧系数;sm为系统等效悬挂质量。根据二阶系统特性,有悬点对泵负载频域响应rerpFsGsFs,其时域响应-1LrereFtFs。抽油杆运动特性存在两种情况,即欠阻尼和过阻尼情况,可以通过二阶系统的动态响应分析方法如振荡频率、超调量、峰值时间、振荡时间、衰减系数来认识分析系统。这里分析在欠阻尼情况下01,系统阶跃响应211sin1ntrerpdFtFtet,21dn为系统阻尼振荡频率,arccos为相角。因此可以得到第二阶段悬点的力平衡方程:2lsrprfrflreFmatgFtFFt(3)3第三阶段悬点到达上死点后开始下行,抽油杆下部和泵柱塞由于惯性继续上行,抽油杆振荡由于振荡条件改变而迅速衰减,此时抽油杆的拉伸变形逐渐恢复,泵的游动阀保持关闭,固定阀处于打开位置,抽油杆相当于在一个充满液体的容器里单独移动,抽油杆仅受拉力、重力、浮力和摩擦力的作用。这一阶段,抽油杆惯性质量32332,srmrssssTtmmTtTTT,到泵柱塞移动前它达到最大值rm,模型是一个垂直下放的连续杆,悬点力平衡方程表示为:3lsrprrmprfrflFFmgmatFtF(4)4第四阶段悬点继续下行,泵柱塞到达最高位之后也开始下行,此时泵固定阀关闭,游动阀打开,抽油杆运动受到了泵的阻尼效应,引起抽油杆下端载荷突变,同样也会使抽油杆系统产生振荡。泵的瞬态阻尼可由下式计算得到:rpppmvmvppFmgatptSfvt(5)式中,2mvmvmvflppSpkvtS为流体流过游动阀时的压力降,同流体密度和流速有关。悬点在第四阶段运行也可认为是一个较为稳定的阶段,近似为匀速,泵阻尼的加载时间很短,这就相当于在抽油杆系统上施加了一个阶跃响应,同第二阶段一样,也可以作为一个二阶系统加以分析。第四阶段有悬点力平衡方程如下:4lsrprfrflreFmgatFtFFt(6)式中,reFt的计算同第二阶段方法相同。悬点载荷在一个冲次周期内的变化规律可以通过上述四个阶段的动力学平衡方程加以描述。当抽油机井泵挂较浅时,抽油杆的动态响应近似于一个二阶振荡环节,通过分析系统的动态响应曲线,可以得到系统的等效质量和等效摩擦,从而将实现系统的定量分析。当泵挂较深时,如1500米以上,由于力在抽油杆中的传递时间不容忽视,采用近似方法误差将会增大,此时只能利用波动方程求解,或者寻求另外一种近似方法能够较好地拟合系统的动态响应。仿真研究为了验证上述公式的有效性,本文构建一个抽油机系统进行仿真,并作出仿真系统的悬点示功图,同来自现场的示功图进行比对。假设曲柄角速度为恒值,系统基本情况描述如下:(1)抽油机选择,如表1所示。表1仿真抽油机主要参数取值表抽油机型号冲程(m)冲次(冲/分钟)曲柄半径(m)游梁前臂长(m)游梁后臂长(m)抽油机结构不平衡重(N)10-3-37B3.04861.0873.9372.82-3320根据悬点运动规律[8][9][10]进行仿真,结果如图2所示:图2游梁式抽油机悬点运动规律曲线(2)井下系统基本情况确定选用3吋半油管,外径101.6mm,内径88.6mm。抽油泵选用70管式泵,泵筒有效长度6m,柱塞长度1.8m,游动阀过流面积321.0310m,固定阀过流面积321.2510m,泵深1200m,动液面800m。抽油杆选用两级杆,一吋杆和7分杆,连接处位于600m深处,一吋杆空气中每米重41N,密度0.85液中重36.7N,7分杆空气中每米重31.9N,密度0.85液中重28.7N。抽油杆弹性模量1022.110/ENm;抽油杆有效弹簧系数:4410412125.1103.8102.1103.1210/600600rodroderodrodSSKENmLL(3)外围
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 aqwertyuiop
aqwertyuiop
本文标题:游梁式抽油机悬点载荷的动态响应分析(zuixin)
链接地址:https://www.777doc.com/doc-4565624 .html