您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 其它行业文档 > 手推式收粮装袋机架构与设计原理
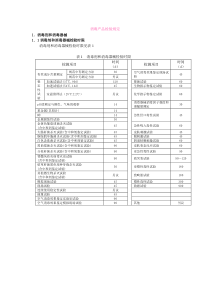
龙源期刊网手推式收粮装袋机架构与设计原理作者:郭瑞明郭洪强孙群赵颖程煜刚李雪梦来源:《工业技术创新》2019年第02期摘;;要:设计一种适用于小麦等颗粒性粮食的新型手推式收粮装袋机。利用旋转毛刷将粮食从扁平漏斗状的进粮口扫入螺旋式输送装置中,并通过螺旋蛟簧将粮食提升到壳体式输送带上。阐述了整体结构及工作原理,提出了设计思路,对动力和传动元件等关键件进行了理论测算,基于运动学关系、CATIA对运动机构进行了仿真验证。设计实现了在输粮输送过程中对粮食进行清洁。输送带的末端设有出粮口,可将粮食直接送入出粮口的麻袋中。新型手推式收粮装袋机具有快速收集粮食、简化收粮过程等特点,可在农业领域推广应用。关键词:手推式;收粮装袋机;颗粒性粮食;螺旋蛟簧;螺旋式输送中图分类号:TH111;;;文献标识码:A;;;文章编号:2095-8412(2019)01-043-06工业技术创新URL:http://:10.14103/j.issn.2095-8412.2019.01.006引言传统的收粮过程采用两人配合的方式:一人持袋并保持袋口张开,另一人反复弯腰起身并用工具将粮食送入袋中。这种收粮方式不仅劳动强度大、过程繁琐,而且粮食入袋的过程中会造成尘土飞扬,影响周围环境。此外,该方式收粮效率较低,一旦遇到暴雨天气,会造成严重经济损失[1]。目前,市面上已经出现了几种类型的收粮机。李晓建[2]设计了一种“家用带式收粮机”,如图1所示。该机由扫粮装置、传送装置和称重装置组成。其中,扫粮装置由“旋转扫帚”构成,但因其在轴向方向没有挡板,所以不容易将粮食输送到传送带上。郭德伟等[3]设计了一种“小型刮板式收粮机”,其可通过旋转的刮板机构与底板配合来收取粮食,但因其传送带是倾斜的,所以作业高度较高,而且容易造成粮食的脱落与遗漏和刮粮不够彻底等问题。金亦富等[4]设计了一种“自走式收粮机”(TH-170型),其为配备汽车的大型收粮机,成本相对较高,不适合在农村大范围推广。本文设计一种适用于小麦、玉米和豆类等颗粒性粮食的新型手推式收粮装袋机,旨在简化收粮过程,在收粮过程中对粮食进行清洁,提高收粮效果与效率。1;设计思路如图2所示,新型手推式收粮装袋机由扫粮装置、螺旋式输送装置、壳体、承载装置和机架组成。其采用两个电机作为动力源,一个电机通过带传动驱动螺旋式输送装置,另一个电机龙源期刊网通过齿轮传动与带传动驱动输送带和扫粮装置。进粮口设计成扁平漏斗状,以配合扫粮装置,使粮食快速进入输送装置。扫粮装置由旋转毛刷构成。螺旋式输送装置由小型螺旋软管上料机[5]构成,其与新型手推式收粮装袋机紧密配合,可使粮食从进粮口快速提升到输送带上。输送带的表面设有清洁粮食用的通孔,且输送带的周围设有壳体,壳体的下部镂空,以使粮食中的尘土等杂质落到机架或地面上。出粮口与输送带的壳体贯通。麻袋系于出粮口,并能够有效固定在承載装置上。2;系统关键部件设计2.1;动力元件的选择如图2所示,电机1用于驱动小型螺旋软管上料机,而小型螺旋软管上料机需把粮食从进粮口提升到输送带上。根据提升高度为500mm的技术要求,电机1选择额定功率为1.5kW、额定电压为220V,额定转速为1400r/min的单相异步电机。此外,与电机1配合的蛟簧软管的尺寸及规格如表1所示。电机2用于驱动输送带和旋转毛刷。由于旋转毛刷传动轴的转速为240r/min,且输送带滚筒的转速在420~450r/min时作业效果较好,因此,电机2选择额定转速为900r/min、额定功率为180W、额定电压为220V的单相异步电机。2.2;传动元件设计2.2.1;带轮和齿轮设计由于电机自身携带的带轮直径为50mm,根据转速比公式n1:n2=2:1,滚筒的带轮直径应为100mm。由于传送带的旋转方向为逆时针,与旋转毛刷的旋转方向相反,所以旋转毛刷传动轴的驱动通过齿轮传动和带传动两种传动方式实现。为了使传动轴的转速达到240r/min,选择外啮合的齿轮的主要参数如表2所示[6,7]。此外,由于主从动齿轮的转速之比为2:1,所以小带轮与大带轮的直径比为48:90。如图3所示,旋转毛刷传动轴的驱动原理为:电机5通过其轴上自带齿轮1将动力传递到齿轮2,齿轮2与主动带轮3同步转动,并通过带传动带动从动齿轮4旋转,从而驱动旋转毛刷的传动轴工作。2.2.2;旋转毛刷设计旋转毛刷的结构如图4所示。旋转毛刷的作用是将地面上的颗粒性粮食扫入进粮口腹中,因此需要具有一定的弹性。选择耐高温尼龙作为旋转毛刷的材料。此外,旋转毛刷的转轴选择型号为42CrMo的传动轴。2.2.3;壳体式输送带设计龙源期刊网所示。为了在粮食输送的过程中防止粮食脱落与遗漏,在输送带的周围设计了一个壳体。此外,在输送带的表面开有直径为2mm的通孔,以起到除尘的效果。2.3;进粮口设计进粮口作为粮食的进口处,其结构决定着收粮效率。如图6所示,将进粮口设计成扁平漏斗状,且横截面积由表到里越来越小,以满足粮食快速收集的需求。进粮口的底板中间开有宽度为80mm的凹槽,以放置蛟簧软管。而且,进粮口的前端与地面接触,随着收粮机的不断推进,扫粮装置将粮食快速扫入进粮口腹中,并配合螺旋蛟簧将粮食向输送带输送。2.4;车轴设计为满足收粮装袋机的使用性能及稳定性要求,收粮装袋机的满载重量设计为95kg,即两个车轴的平均受力为475N。45号钢可应用于轴类零件的设计,且具有较好的综合性能,因此在车轴材料中选用之,并进行调质处理[8]。为保证整机可靠性,对车轴进行受力分析。由于车轴的弯曲为横力弯曲,因此车轴的横截面上不仅有正应力,还有切应力,但细长轴的控制因素通常是弯曲正应力,满足弯曲正应力强度条件的轴,一般都能满足切应力的强度条件[9]。45号钢在调制处理后的弯曲许用应力=60MPa,弯曲正应力的强度条件为2.5;机架设计机架主要用于承载整机重量,并通过三对车轮与地面接触,与车轮相连的部件是主要受力对象。新型手推式收粮装袋机外观类似于手扶式推车,设计时,综合考虑了收粮、输粮和装粮三个阶段的方便性。图8所示为机架二维模型的结构和尺寸。3;整体结构及工作原理如图9所示,新型手推式收粮装袋机主要由进粮口、旋转毛刷、壳体式输送带、小型螺旋软管上料机、机架、承载装置及电机等零部件组成。机架顶部设有把手,机架底部的前端装有2对万向轮,后端装有1对车轮,后端的承载装置用于安置麻袋,机架上装有倾斜的壳体式输送带,用于输送和清洁粮食。输送带的上端装有小型螺旋软管上料机,以将粮食从进粮口提升到输送带。进粮口装有旋转毛刷,后端装有电机,以将地面上的粮食扫入进粮口。工作原理:首先,一个电机通过带传动将动力传给滚筒,带动传送带运转,同时,通过齿轮传动和带传动将动力传给旋转毛刷的传动轴,传动轴带动旋转毛刷做扫粮运动。然后,另一个电机通过带传动带动小型螺旋软管上料机的蛟簧作旋转运动。操作者向前推进收粮装袋机时,旋转毛刷、螺旋软管上料机和输送带一起工作,进行收粮和输粮。最后,粮食被输送到承载装置的麻袋中,完成灌包工作。龙源期刊网机构仿真车轴设计完成后,基于CATIAGenerativeStructuralAnalysis模块对其进行有限元仿真[10],模拟真实环境下的工作状态,校核车轴的强度。如图10所示,整个车轴承受的最大应力约为10MPa,远远低于弯曲许用应力60MPa。因此,车轴满足设计要求。此外,为保证收粮机正确的运动学关系,基于CATIA对运动机构进行了仿真验证[11]。仿真结果表明,电机可驱动旋转毛刷和输送带实施粮食的收集和输送工作。如图11所示,主从动齿轮传动稳定,且转速之比为2:1。5;结束语本文设计了一种新型的手推式收粮装袋机。整机结构紧凑、使用方便,实现了收粮过程中机械代替人力,并对粮食同步清洁的设计要求。实现了收粮、输粮、灌包一体化,简化了收粮过程的需求。采用小型螺旋软管上料机与收粮机完美结合,提高了收粮效率。通过运动学分析,验证了收粮机设计的有效性。基金项目山东省主要农作物机械化生产装备协同创新中心项目资助;聊城大学科研基金(318011519)参考文献[1]黄盛杰,季红霞.我国农业机械自动化发展现状及趋势[J].江苏农机化,2012(4):38-39.[2]李晓健.家用带式收粮机的设计[D].德州:德州学院机电工程学院,2016.[3]郭德伟,李丽,俞利宾,等.小型刮板式自动收粮机的设计[J].农机化研究,2017,39(1):106-110.[4]金亦富,秦浩天,李振岩,等.TH-170型自走式收粮机的设计与试验[J].江苏农机化,2015(6):28-30.[5]都红云,赵军.圆管螺旋给料机的设计与制作[J].现代面粉工业,2014(2):16-19.[6]郭宏亮,孙志宏.机械原理[M].北京:北京大学出版社,2011.[7]朱子宏,魏宪军.基于CATIA的渐开线直齿轮参数化设计[J].现代机械,2009(1):8-9.龙源期刊网[8]李強.机械设计中的材料选择和应用探讨[J].城市建设理论研究:电子版,2015(20).[9]刘鸿文.高等材料力学[M].北京:高等教育出版社,1985.[10]刘宏新,宋微微,廉光赫.基于CATIA的大型农具机架有限元分析与结构优化[J].东北农业大学学报,2012(11):116-121.[11]彭春雷.基于CATIA的渐开线圆柱齿轮建模及运动仿真[J].中国高新技术企业,2010(9):18-19.
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
 lingyiwen
lingyiwen
本文标题:手推式收粮装袋机架构与设计原理
链接地址:https://www.777doc.com/doc-4654609 .html