您好,欢迎访问三七文档
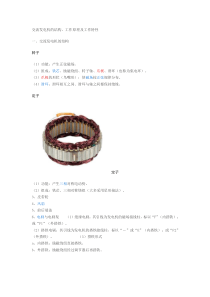
绪论分拣是把很多货物按品种从不同的地点和单位分配到所设置的场地的作业。按分拣的手段不同,可分为人工分拣、机械分拣和自动分拣。目前自动分拣已逐渐成为主流,因为自动分拣是从货物进入分拣系统送到指定的分配位置为止,都是按照人们的指令靠自动分拣装置来完成的。这种装置是由接受分拣指示情报的控制装置、计算机网络,把到达分拣位置的货物送到别处的的搬送装置。由于全部采用机械自动作业,因此,分拣处理能力较大,分拣分类数量也较多。随着社会的不断发展,市场的竞争也越来越激烈,因此各个生产企业都迫切地需要改进生产技术,提高生产效率,尤其在需要进行材料分拣的企业,以往一直采用人工分拣的方法,致使生产效率低,生产成本高,企业的竞争能力差,材料的自动分拣已成为企业的唯一选择。针对上述问题,利用PLC技术设计了一种成本低,效率高的材料自动分拣装置,在材料分拣过程中取得了较好的控制效果。物料分拣采用可编程控制器PLC进行控制,能连续、大批量地分拣货物,分拣误差率低且劳动强度大大降低,可显著提高劳动生产率。而且,分拣系统能灵活地与其他物流设备无缝连接,实现对物料实物流、物料信息流的分配和管理。其设计采用标准化、模块化的组装,具有系统布局灵活,维护、检修方便等特点,受场地原因影响不大。同时,只要根据不同的分拣对象,对本系统稍加修改即可实现要求。PLC控制分拣装置涵盖了PLC技术、气动技术、传感器技术、位置控制技术等内容,是实际工业现场生产设备的微缩模型。应用PLC技术结合气动、传感器和位置控制等技术,设计不同类型材料的自动分拣控制系统。该系统的灵活性较强,程序开发简单,可适应进行材料分拣的弹性生产线的需求。本文主要介绍了PLC控制系统的硬件和软件设计,以及一些调试方法。第1章材料分拣装置结构及总体设计PLC控制分拣装置涵盖了PLC技术、气动技术、传感器技术、位置控制技术等内容,是实际工业现场生产设备的微缩模型。本章主要介绍分拣装置的工艺过程及控制要求。要想进行PLC控制系统的设计,首先必须对控制对象进行调查,搞清楚控制对象的工艺过程、工作特点,明确控制要求以及各阶段的特点和各阶段之间的转换条件。1.1材料分拣装置工作过程概述如图1-1所示为本分拣装置的结构示意图。图1-1材料分拣装置结构示意图它采用台式结构,内置电源,有步进电机、汽缸、电磁阀、旋转编码器、气动减压器、滤清器、气压指示等部件,可与各类气源相连接。选用颜色识别传感器及对不同材料敏感的电容式和电感式传感器,分别固定在网板上,且允许重新安装传感器排列位置或选择网板不同区域安装。系统上电后,可编程序控制器首先控制启动输送带,下料传感器SN检测料槽有无物料,若无料,输送带运转一个周期后自动停止等待下料;当料槽有料时,下料传感器输出信号给PLC,PLC控制输送带继续运转,同时控制气动阀5进行下料,每次下料时间间隔可以进行调整。物料传感器SA为电感传感器,当检测出物料为铁质物料时,反馈信号送PLC,由PLC控制气动阀1动作选出该物料;物料传感器SB为电容传感器,当检测出物料为铝质物料时,反馈信号送PLC,PLC控制气动阀2动作选出该物料;物料传感器SC为颜色传感器,当检测出物料的颜色为待检测颜色时,PLC控制气动阀3动作选出该物料。物料传感器SD为备用传感器。当系统设定为分拣某种颜色的金属或非金属物料时,由程序记忆各传感器的状态,完成分拣任务。1.2系统的技术指标输入电压:AC200~240V(带保护地三芯插座)消耗功率:250W环境温度范围:-5~40℃气源:大于0.2MPa切小于0.85Mpa1.3系统的设计要求系统的设计要求主要包括功能要求和控制要求,进行设计之前,首先应分析控制对象的要求。1.3.1功能要求材料分拣装置应实现基本功能如下(1)分拣出金属和非金属(2)分拣某一颜色块(3)分拣出金属中某一颜色块(4)分拣出非金属中某一颜色块(5)分拣出金属中某一颜色块和非金属中某一颜色块1.3.2系统的控制要求系统利用各种传感器对待测材料进行检测并分类。当待测物体经下料装置送入传送带后,依次接受各种传感器检测。如果被某种传感器测中,通过相应的气动装置将其推入料箱;否则,继续前行。其控制要求有如下9个方面:(1)系统送电后,光电编码器便可发生所需的脉冲(2)电机运行,带动传输带传送物体向前运行(3)有物料时,下料汽缸动作,将物料送出(4)当电感传感器检测到铁物料时,推汽缸1动作(5)当电容传感器检测到铝物料时,推汽缸2动作(6)当颜色传感器检测到材料为某一颜色时,推汽缸3动作(7)其他物料被送到SD位置时,推汽缸4动作(8)汽缸运行应有动作限位保护(9)下料槽内无下料时,延时后自动停机第2章控制系统的硬件设计PLC控制系统的硬件设计,主要是根据被控制对象对PLC控制系统的功能要求,确定系统所需的用户输入、输出设备,选择合适的PLC类型,并分配I/O点。2.1系统的硬件结构设计系统的硬件结构框图,如图2-1所示。图2-1系统的硬件结构框图2.2系统关键技术系统关键技术即分析控制系统的要求,确定I/O点数,选择PLC的型号,然后进行I/O分配。2.2.1确定I/O点数根据控制要求,输入应该有2个开关信号,6个传感器信号,包括电感传感器、电容传感器、颜色传感器、备用传感器,以及检测下料的传感器和计数传感器。相应地,有5个汽缸运动位置信号,每个汽缸有动作限位和回位限位,共计10个信号。输出包括控制电动机运行的接触器,以及5个控制汽缸动作的电磁阀。共需I/O点24个,其中18个输入,6个输出。2.2.2PLC的选择根据上面所确定的I/O点数,且该材料分拣装置的控制为开关量控制。因此,选择一般的小型机即可满足控制要求。本系统选用西门子公司的S7-200系列CPU226型PLC。它有24个输入点,16个输出点,满足本系统的要求。2.2.3PLC的输入输出端子分配根据所选择的PLC型号,对本系统中PLC的输入输出端子进行分配,如表1所示表1材料分拣装置PLC输入/输出端子分配表西门子PLC(I/O)分拣系统接口(I/O)备注输入部分I0.0UCP(计数传感器)接旋转编码器I0.1SN(下料传感器)判断下料有无I0.2SA(电感传感器)I0.3SB(电容传感器)I0.4SC(颜色传感器)I0.5SD(备用传感器)I0.6SFW1(推气缸1动作限位)I0.7SEW2(推气缸2动作限位)I1.0SFW3(推气缸3动作限位)I1.1SFW4(推气缸4动作限位)I1.2SFW5(下料气缸动作限位)I1.3SBW1(推气缸1回位限位)I1.4SBW2(推气缸2回位限位)I1.5SBW3(推气缸3回位限位)I1.6SBW4(推气缸4回位限位)I1.7SBW5(下料气缸回位限位)I2.0SB1(启动)I2.1SB2(停止)输出部分Q0.0M(输送带电机驱动器)Q0.1YV1(推气缸1电磁阀)Q0.2YV2(推气缸2电磁阀)Q0.3YV3(推气缸3电磁阀)Q0.4YV4(推气缸4电磁阀)Q0.5YV5(下料气缸电磁阀)2.2.4PLC输入输出接线端子图根据表1可以绘制出PLC的输入输出接线端子图,如图2-2所示。图2-2PLC输入输出接线端子图2.3检测元件与执行装置的选择主要是对旋转编码器和各个传感器的选择,并对其作简要介绍。2.3.1旋转编码器旋转编码器是与步进电机连接在一起,在本系统中可用来作为控制系统的计数器,并提供脉冲输入。它转化为位移量,可对传输带上的物料进行位置控制。传送至相应的传感器时,发出信号到PLC,以进行分拣,也可用来控制步进电机的转速。本系统选用E6A2CW5C旋转编码器,原理如图2-3所示。图2-3旋转编码器原理示意图旋转编码器介绍:旋转编码器是用来测量转速的装置。技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。它分为单路输出和双路输出两种。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。编码器如以信号原理来分,可分为增量脉冲编码器(SPC)和绝对脉冲编码光电码盘器(APC)两者一般都应用于速度控制或位置控制系统的检测元件。编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。工作原理如下:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。分辨率:编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。信号输出:信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。信号连接:编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。如单相联接,用于单方向计数,单方向测速。A、B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位置测量。A、A-,B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米2.3.2电感传感器电感式接近开关属于有开关量输出的位置传感器,用来检测金属物体。它由LC高频振荡器和放大处理电路组成,利用金属物体在接近这个能产生电磁场的振荡感应头时,使物体内部产生涡流。这个涡流反作用于接近开关,使接近开关振荡能力衰减,内部电路的参数发生变化。由此,可识别出有无金属物体接近,进而控制开关的通或断。本系统选用M18X1X40电感传感器。接线图如图2-4,原理图如图2-5。图2-4M18X1X40DC二线常开式电感传感器接线图图2-5电感传感器工作原理图电感传感器介绍:由铁心和线圈构成的将直线或角位移的变化转换为线圈电感量变化的传感器,又称电感式位移传感器。这种传感器的线圈匝数和材料导磁系数都是一定的,其电感量的变化是由于位移输入量导致线圈磁路的几何尺寸变化而引起的。当把线圈接入测量电路并接通激励电源时,就可获得正比于位移输入量的电压或电流输出。电感式传感器的特点是:①无活动触点、可靠度高、寿命长;②分辨率高;③灵敏度高;④线性度高、重复性好;⑤测量范围宽(测量范围大时分辨率低);⑥无输入时有零位输出电压,引起测量误差;⑦对激励电源的频率和幅值稳定性要求较高;⑧不适用于高频动态测量。电感式传感器主要用于位移测量和可以转换成位移变化的机械量(如力、张力、压力、压差、加速度、振动、应变、流量、厚度、液位、比重、转矩等)的测量。常用电感式传感器有变间隙型、变面积型和螺管插铁型。在实际应用中,这三种传感器多制成差动式,以便提高线性度和减小电磁吸力所造成的附加误差。2.3.3电容传感器电容传感器也属于具有开关量输出的位置传感器,是一种接近式开关。它的测量头通常是构成电容器的一个极板,而另一个极板是待测物体的本身。当物体移向接近开关时,物体和接近开关的介电常数发生变化,使得和测量头相连的电路状态也随之发生变化。由此,便可控制开关的接通和关断。本系统选用E2KX8ME1电容传感器,接线图可参考图2-5,原理图如图2-6。图2-6电容传感器工
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 654992
654992
本文标题:自动分拣系统的设计
链接地址:https://www.777doc.com/doc-4781673 .html