您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 综合/其它 > 适用于液压支架结构件机器人焊接的拼装工艺研究
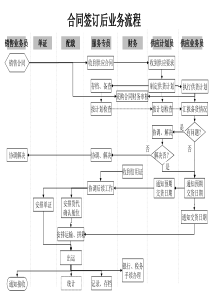
适用于液压支架结构件机器人焊接的拼装工艺研究赵旭段青辰孟贺超【摘要】通过对液压支架结构件现有拼装工艺进行研究优化,提出了适合机器人焊接的拼装新方案,并经实际生产试验,验证了此方案在提高机器人焊接可达率及焊接效率方面的先进性。关键词:液压支架;机器人焊接;拼装工艺1.概述液压支架作为煤矿综采关键设备之一,逐渐向大采高、高寿命、轻量化方向发展,这对液压支架主体结构件的质量,特别是焊接质量提出了更高要求。目前,行业内通用的做法是对现有制造模式的进一步挖掘,以期提升产品质量。但这种方式对人员要求高,易出现质量波动,且导致生产效率降低。我公司结合国内外制造业发展趋势,在充分论证的基础上提出了利用机器人焊接液压支架结构件的制造新模式,现已批量应用。在应用过程中,我们结合机器人焊接特点对现有工艺不断进行优化和改进,为后期引入自动拼焊生产线打下了基础。本文以机器人可焊率为切入点,选取了支架中最为典型的掩护梁体为研究对象,通过改变其拼装工艺,提高了机器人的可焊率及焊接效率,并通过实际生产试验验证了此工艺的合理性。2.工艺方案优化掩护梁体是由顶板、主筋组件、平衡耳座、盖板、内部纵横筋板及其他附件拼焊而成的封闭箱型结构(见图1,图中盖板及附件已隐藏),所用钢板厚度在20~60mm之间,生产时需经多次拼焊而成,生产难度较大。图1掩护梁结构1.平衡耳座2.内部筋板3.顶板4.主筋组件目前,针对此构件通用的生产工艺如图2(仅为部分工艺流程)所示,现有一拼工序是将图1中1~4各零组件一次拼成,焊接量大,且空间焊缝较多,人工焊接时不受影响,但因机器人关节臂和焊枪结构的限制,将存在可焊率低、人工补焊量大等问题,且因一次拼装零件多,耗时长,不利于后期生产线的节拍匹配,因此需要进行优化。图2掩护梁通用拼装工艺在对掩护梁拼装工艺优化的过程中,我们以后期生产线建设为目标,结合我公司多年使用机器人焊接的成熟经验,提出了如图3(仅为部分工艺流程)所示的适合机器人焊接的优化方案。优化后的工艺方案使机器人的理论可焊率大为提高,同时各工序节拍匹配更为合理,为后期自动拼焊生产线的引入打下了基础。为论证此方案的可行性,我们随后进行了多批次产品的实际生产试验。3.生产试验验证(1)试验方法及内容为全面验证掩护梁拼装新工艺的合理性,我们从机器人焊接可达率、焊接效率、铰接孔焊后同轴度、铰接孔处档距四个方面进行实际跟踪测量,其测量位置及工艺要求如图4所示。本次试验选取某型号液压支架掩护梁为试验对象,按上述两种工艺各生产3架进行对比,其中新工艺编号为:1、2、3,老工艺编号为:4、5、6。试验过程中,除拼装方案不同外,其余条件保持一致。(2)试验结果及分析第一,机器人焊接可达率及效率。首先,试验选取的掩护梁构件一次焊丝量为120kg、二次20.5kg、三次46kg,一次焊接比重占比64.5%,是影响活件整体焊接效率的关键工序。本次试验以各焊接工序理论焊丝量为基准,以机器人焊接量占比表示可达率,实际统计6个活件机器人和人工补焊焊丝量结果如表1所示、机器人焊接可达率如图5所示。图3掩护梁拼装工艺优化图4掩护梁测量位置及工艺要求表1掩护梁各焊接工序机器人和人工补焊焊丝量统计结果(mm)工序节点一焊二焊三焊一焊二焊三焊工序节点试件编号焊接方式试件编号焊接方式1机器人100.516.843.4人工补焊4.63.43.2人工补焊19.84.23.5机器人116.217.243.542机器人99.717.242.7人工补焊43.82.4人工补焊20.23.84.2机器人116.816.943.853机器人101.216.843.6人工补焊5.23.23.5人工补焊19.543.2机器人115.517.143.26图5掩护梁各焊接工序机器人焊接可达率分析由表1及图5可以看出,机器人代替人工焊接是切实可行的,实际统计焊丝重量时,因焊丝实际损耗及称重误差,各工序焊丝总重与理论计算存在偏差,但这对机器人焊接可达率及效率分析影响甚微。对于掩护梁两种拼装工艺,二、三次焊接工序的机器人焊接可达率差别不大,其中三次焊接因盖板大多为平直焊缝,两种工艺的焊接可达率均能达到92%以上,而一次焊接可达率差别较大。新工艺通过改变拼装方式,使焊接可达率平均提升约13%,效果明显。机器人焊接可达率的提升同时会使焊接消耗时间大幅缩短,粗略估算,可使焊接效率提升9.5%以上,单批产品可缩短制造周期约2天,效益显著。第二,铰接孔焊后同轴度。由于我公司针对液压支架主体结构件都会进行焊后的整体镗孔,所以工艺对铰接孔焊后同轴度要求较宽,主要以活件整镗时不出现黑皮为原则。实际生产过程中对铰接孔焊后的同轴度测量采用刚性轴四孔顺利通过法,刚性轴直径为(C-1.5)mm。本次试验选取的活件三组孔预镗孔径均为φ148mm,则选取刚性轴的直径为146.5mm,实际测量6个活件的结果如表2所示。由表2可以看出,两种工艺生产出的掩护梁体铰接孔焊后的同轴度都能满足工艺要求,但1#~3#活件出现两组孔穿轴时较紧的情况,而4#~6#活件仅出现一组。经分析后得知,新的拼装工艺在一拼时铰接孔需二次定位,而生产试验时采用人工将左、右箱体及中间组件合体,误差累计较大造成,这种状况可由后期机器人自动拼装解决。表2掩护梁铰接孔同轴度测量结果试件编号测量部位测量结果试件编号测量部位测量结果第一组孔四孔通(较紧)第一组孔四孔通第二组孔四孔通第二组孔四孔通第三组孔四孔通第三组孔四孔通14第一组孔四孔通第一组孔四孔通(较紧)第二组孔四孔通第二组孔四孔通第三组孔四孔通第三组孔四孔通25第一组孔四孔通(较紧)第一组孔四孔通第二组孔四孔通第二组孔四孔通第三组孔四孔通第三组孔四孔通36第三,铰接孔处档距。铰接孔处的档距尺寸对支架的升降运动有直接影响,若档距尺寸超差,将导致支架部件运动发生干涉或窜动。针对掩护梁部件,需测量的部位有连杆铰接处包容尺寸A、顶掩铰接处被包容尺寸B,两者的公差要求如图4所示,本次试验的6个活件测量结果如表3所示。由表3可以看出,两种工艺生产出的掩护梁体铰接处档距尺寸最终都能满足工艺要求,但1#~3#活件档距尺寸变化较为均匀,A部位最终档距变化量及平均变化量均在1mm以内、B部位最终档距变化量在2mm以内,这是因为优化后的拼装工艺将集中焊缝分多次预埋,活件整体热输入控制在较低水平,对减小变形有利。4.结语本文提出的关于液压支架结构件新的制造模式,是对传统制造模式的一种重大变革,也是向自动拼焊生产线建设的一种尝试。经过理论研究和实际生产验证得知,新的拼装工艺达到了以下效果。表3掩护梁铰接孔处档距测量结果(mm)试件编号测量部位变化量2累计焊前焊后变化量1公称尺寸测量节点及数值去支撑前去支撑后1A3703713710370-1-1B4304324320431-1-12A3703703711370-10B4304324320432003A3703703700369-1-1B430433432-1431-1-24A3703703700369-1-1B4304324320431-1-15A3703703700369-1-1B430432430-24310-26A3703713710370-1-1B430433432-1430-2-3(1)相比传统工艺,新的工艺使机器人焊接可达率显著提升(如掩护梁提升约13%),同时减少了人工补焊量,降低了工人的劳动强度。(2)相比传统工艺,新的工艺使结构件焊接效率显著提升(如掩护梁提升约9.5%),缩短了产品制造周期,效益显著。(3)新的工艺在一定程度上减少了焊接变形和焊后矫正工作量,在提升产品质量的同时,也降低了生产成本。作者简介:赵旭等,郑州煤矿机械集团股份有限公司。项目:河南省重大科技专项:《高端综采液压支架智能制造焊接机器人的研究与应用》。项目编号:161100211300
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 wufangjun520
wufangjun520
本文标题:适用于液压支架结构件机器人焊接的拼装工艺研究
链接地址:https://www.777doc.com/doc-4974675 .html