您好,欢迎访问三七文档
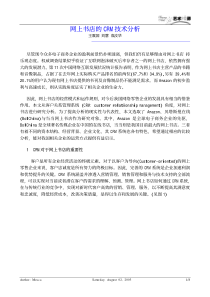
当前位置:首页 > 行业资料 > 国内外标准规范 > 工业机器人操作与编程 单轴运动的手动操纵
单轴运动的手动操纵1.单轴运动的手动操纵1.1六轴机器人1.2单轴运动1.3操作方法1/10主要内容•学习机器人单轴运动的手动操作2/10六轴机器人1.1认识六轴机器人:机器人本体分为六个关节轴,如图(左)所示。机器人通过六个伺服电动机分别驱动机器人的六个关节轴,每根轴是可以单独运动的,且每根轴都有一规定的运动正方向。机器人各个关节轴单轴运动的方向如图(右)所示。3轴2轴1轴4轴5轴6轴3/10单轴运动•每次手动操作一个关节轴的运动,就称之为单轴运动。•单轴运动在进行粗略的定位和比较大幅度的移动时,相比其他的手动操作模式会方便快捷很多。单轴运动单轴运动:每次手动操作一个关节轴的运动。在一些特别的场合使用单轴运动来操作会很方便快捷,比如说在进行转数计数器更新的时候可以用单轴运动的操作,还有机器人出现机械限位和软件限位,也就是超出移动范围而停止时,可以利用单轴运动的手动操作,将机器人移动到合适的位置。4/101.2操作方法在状态栏中,确认机器人当前为手动状态。单轴运动的方法:5/101.3单击示教器左上角按钮,选择“手动操纵”。在手动操纵的属性界面,单击“动作模式”。单轴运动的方法:6/101.3操作方法操作方法动作模式有四种,选中“轴1-3”,然后单击“确定”,就可以对机器人轴1-3进行操作;选中“轴4-6”,然后单击“确定”,就可以对机器人轴4-6进行操作。例如选中“轴1-3”,然后单击“确定”,就可以对机器人轴1-3进行操作。单轴运动的方法:7/101.3操作方法用手按下使能器,并在状态栏中确认已经正确进入“电机开启”状态。操纵机器人示教器上的手动操纵杆,完成单轴运动。图示右下角显示的是轴1-3操纵杆方向,箭头方向代表正方向,表示操纵杆向所示方式拨动,机器人运动方向为对应轴的正方向。单轴运动的方法:8/101.3总结•通过学习,掌握单轴运动手动操作的方法。9/10THANKS!
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 cyfice2008
cyfice2008
本文标题:工业机器人操作与编程 单轴运动的手动操纵
链接地址:https://www.777doc.com/doc-5018246 .html