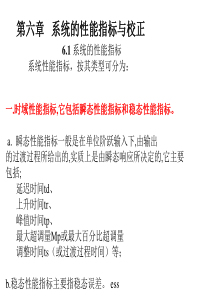
您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械软件 > 机器人技术与PLC试题大全答案
1、一.填空题1.六个子系统是驱动系统、机械结构系统、感受系统、机器人-环境交互系统、人机交互系统和控制系统2.(机器人末端执行器为重复到达同一目标位置(理想位置)而实际到达位置之间的接近程度)重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示,它是衡量一列误差值的密集度(即重复度)3.z方向4.零5.牛顿、拉格朗日6.机器人操作手的独立关节变量多于末端执行器的运动自由度数7.(液压)、(气动)、(电动)8.测速发电机、增量式码盘9.程序、适应性、人工智能10、(指代替原来由人直接或间接作业的自动化机械)11、答:3×112、答:唯一。13、答:两个14、答:位置p15、答:数值解16、答:J。17、答:手部作业空间微小位移dX18、答:微小运动。19、串联机器人、并联机器人20、继电器输出、晶体管输出、双向晶闸管输出二.选择题1.B2.B3.C4.A5.D6.D7.B8.B9.B10.A11.A12.C13.C14.D15.B16.D17.A18.D19.A20.D21.D22.D23.A24.A25.D26.A27.D28.C29.C30.D31。
2、.A32.B33.C34.B35.C36.C37.B38.A39.C40.C41.B42.D43.B44.A45.C46.A47.C48.C49.A50.D51.D52.D53.B54.B55.B56.A57.B58.A59.C60.C61.D62.C63.C64.A65.C66.D67.C68.C69.A70.B71.C72.B73.B74.B三.多选题1.BCD2.ABDE3.ABCE4.BC5.ABD6.AC7.ABCD8.ACE9.DEF10.ABC11.CD12.AB13.BEF14.ADE15.CDE16.BDE四.判断题1.Y2.Y3.Y4.Y5.N6.N7.N8.Y9.Y10.Y11.Y12.Y13.N14.Y15.Y16.Y17.N18.Y19.Y20.N21.Y22.Y23.N24.Y25.N26.Y27.Y28.Y29.Y30.Y31.Y32.N33.N34.Y35.Y36.Y37.Y38.Y39.Y40.Y41.N42.Y43.Y44.N45.Y46.Y47.N48.Y49.N50.N51.Y52.N53.N54.N55.Y56.Y57.Y58.Y59.N60.。
3、Y61.N62.N63.Y64.Y65.N66.N67.N68.Y69.Y70.Y71.Y72.N73.N74.Y75.Y76.N77.Y78.N79.N80.Y81.Y82.N83.N84.N85.N86.N87.Y88.Y89.Y90.Y91.Y92.Y93.Y94.Y95.N96.Y97.Y98.N99.N100.Y101.Y102.N103.N104.Y105.Y106.Y107.N108.N109.Y110.Y111.Y112.N113.Y114.Y115.Y116.N117.Y118.Y五.简答题1.齿轮传动,蜗杆传动,滚珠丝杆出传动,同步齿形带传动,链传动和行星齿轮传动2.答:1、建立坐标系2、确定连杆参数3、写出各个齐次矩阵4、写方程机器人动力学研究目的,建立力、质量和加速度之间以及力矩、惯量和角速度之间的关系。确定力和力矩,计算每个驱动器所需的驱动力,以便在机器人连杆和关节上产生期望的加速度。根据有关方程并考虑机器人的外部载荷计算出驱动器可能承受的最大载荷,设计出能提供足够力及力矩的驱动器。研究机器人不同部件之间的关系,合理地设计出机器人的部件。3.因为现在的电机一般。
4、速度较高,力矩较小,需要通过传动系统降低转速、提高力矩。4.(1)CCD图像传感器、超声波传感器和结构光设备等;(2)视频信号数字化设备,其任务是把摄像机或者CCD输出的信号转换成方便计算和分析的数字信号;(3)视频信号处理器,视频信号实时、快速、并行算法的硬件实现设备:如DSP系统;(4)机器人或机械手及其控制器。5.构成机器人控制系统的基本要素包括:(1)电动机,提供驱动机器人运动的驱动力。(2)减速器,为了增加驱动力矩、降低运动速度。(3)驱动电路,由于直流伺服电动机或交流伺服电动机的流经电流较大,机器人常采用脉冲宽度调制(PWM)方式进行驱动。(4)运动特性检测传感器,用于检测机器人运动的位置、速度、加速度等参数。(5)控制系统的硬件,以计算机为基础,采用协调级与执行级的二级结构。(6)控制系统的软件,实现对机器人运动特性的计算、机器人的智能控制和机器人与人的信息交换等功能。6.机器人编程语言可分为:(1)动作级:以机器人末端执行器的动作为中心来描述各种操作,要在程序中说明每个动作。(2)对象级:允许较粗略地描述操作对象的动作、操作对象之间的关系等,特别适用于组装作业。(3)任。
5、务级:只要直接指定操作内容就可以了,为此,机器人必须一边思考一边工作。7.一个系统的数学模型的结构参数是随位置、时间变化而变化的;因为机器人是典型的非线性变参数系统模型。8.解:v,=Av=10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0100.3000.2000.10=13932.1966.9属于复合变换:旋转算子Rot(Z,30̊)=1000010000866.05.0005.0866.0平移算子Trans(11.0,-3.0,9.0)=10000.91000.30100.110019.解:齐次坐标变换矩阵R=Rot(Y,60̊)Rot(X,30̊)Rot(Z,45̊)=1000010000707.0707.000707.0707.010000866.05.0005.0866.000001100005.0086。
6、6.000100866.005.0=10000433.0436.0436.005.0612.0612.00750.0047.0660.010.解:起始矩阵:B=O=1000010000100001最后矩阵:B´=Rot(Z,30̊)BRot(X,45̊)=10000707.0707.000612.0612.05.000353.0866.011.解:(1)采用三次多项式插值函数规划其运动。已知,4,80,50stff代入可得系数为66.2,94.15,0,53210aaaa运动轨迹:tttttttt96.1588.3198.788.3166.294.155232(2)运动按抛物线过渡的线性插值方式规划:,4,80,50stff根据题意,定出加速度的取值范围:225.2116854s如果选242s,算出过渡时间1at,1at=[422854244422422]=0.594s计算过渡域终了。
7、时的关节位置1a和关节速度1,得1a=4.2)594.04221(52ssast95.24)594.042(11112.解:建立如图1的参考坐标系,则10T=1111000000100001cssc,21T=2212200000100001csLsc,32T=3323300000100001csLscx0y0Ox1y1x2y2x3y3图130T=10T21T32T=12312311212123123112120000100001csLcLcscLsLs其中123123123123cos,sincs.13.解:00000~00003分别为4个呼叫按钮;00004~00007分别对应4个光电开关;01000电机正转;01001电机反转;。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 ape2008
ape2008
本文标题:机器人技术与PLC试题大全答案
链接地址:https://www.777doc.com/doc-5049233 .html