您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 人事档案/员工关系 > 第九章船舶主机遥控系统
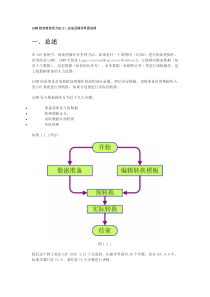
第九章船舶主机遥控系统•1.主机遥控系统的组成•主机遥控系统是由遥控操纵台、遥控装置、测速装置、安全保护装置以及包括遥控执行机构在内的主机操纵系统五大部分组成。•(1)遥控操纵台•遥控操纵台设置在驾驶室和集控室内,它的主要作用是提供人机对话的界面。遥控操纵台上的主要部件是车钟手柄,人通过车钟手柄向遥控系统发出控制命令,如正车、倒车、停车和转速的设定。显示屏向人们提供遥控系统执行命令的情况、各种参数和状态信号的显示、报警指示、车钟记录以及辅车钟信号的联系。紧急操纵按钮用于发出应急运行、应急停车等命令。操纵部位转换开关用于驾驶室与集控室间的遥控部位选择。•(2)遥控装置•遥控装置是整个遥控系统的控制中心,它根据遥控操纵台给出的指令,测速装置提供的主机转速的大小和方向,位置检测器提供的凸轮轴位置信号等,完成对主机的起动、换向、制动、停油等逻辑程序控制以及转速与负荷控制功能。•(3)测速装置•测速装置用来检测主机的转速、转向,向遥控装置提供主机的运行状态。不论遥控系统中的逻辑程序控制,还是转速与负荷控制,都离不开转速、转向信号。否则遥控系统将失灵或误动作。同时,此信号还送往转速表,指示主机的转速大小和转动方向。•(4)遥控执行机构与主机操纵系统•遥控执行机构与主机操纵系统用来执行遥控装置发出的起动、换向、制动、调整等控制命令。在遥控系统失灵时,可通过机旁操纵装置应急操纵主机。•(5)安全保护装置•安全保护装置用来监视主机运行中的一些重要参数。一旦某个重要参数发生严重越限,自动控制主机减速运行,或迫使主机停车,以保障主机安全。安全保护装置是一个不依赖于遥控装置而相对独立的系统,它不会因为遥控装置出现故障而失去效能。•2.主机遥控系统的主要功能•尽管主机遥控系统种类繁多,结构复杂,但设计这些系统的目的都是为了实现控制主机所应具备的各种功能,而各种主机遥控系统的这些功能是类似的。因此,掌握主要功能对后面实际遥控系统的学习会有很大帮助。主机遥控系统的主要功能包括四个方面,即逻辑程序控制、转速与负荷控制、安全保护与应急操作,以及模拟试验。下面分别进行具体介绍。•(1)逻辑程序控制•①换向逻辑控制:当有动车车令即车钟手柄从停车位置移至正车或倒车位置的某一位置,遥控系统首先进行换向逻辑判别,即判断车令位置与实际凸轮轴的位置是否一致。当车令位置与实际凸轮轴位置不符时,便自动控制主机换向,将主机的凸轮轴换到车令所要求的位置上。•②起动逻辑控制:换向逻辑控制完成后,遥控系统紧接着进入起动逻辑判断,也就是对起动条件进行鉴别。•当满足起动主机所需的各项条件时,控制空气分配器投入工作,打开主起动阀,起动空气将进入主机进行起动,在主机转速达到发火切换转速时,自动完成油气转换(对油气并进的主机可提前供油),停止起动。这时若起动成功,自动转入主机加速程序。•③重复起动程序控制:若主机在起动过程中发生点火失败,遥控系统将自动进行第二次起动。若第二次起动又发生点火失败,则自动进行第三次起动。当出现第三次起动失败时,遥控系统将自动停止起动,同时发出起动失败报警。•④重起动逻辑控制:在应急起动、倒车起动或有重复起动的情况下,为了提高主机起动的成功率,遥控系统将自动增大起动供油量,或者自动地提高起动空气切断转速对主机进行重起动。•⑤慢转起动逻辑程序:当主机停车时间超过规定时间(一般是30~60min内可调)以后,或在停车期间停过电,再起动主机时,遥控系统将自动控制主机先进入慢转起动,即让主机缓慢转动1~2转,随后再转入正常起动。若慢转起动失败,将发出报警信号并且封锁正常起动。•⑥主机运行中的换向与制动逻辑程序控制:当船舶全速航行遇到紧急情况时,若把车钟手柄拉到停车位置,遥控系统会发出停油动作,由于船舶的惯性很大,船舶的滑行距离很长,主机转速也会因为螺旋桨的水涡轮作用而保持相当长的时间,这对紧急避碰来说是极为不利的。为了解决这个问题,现在的主机遥控系统一般都设有主机运行中的换向与制动功能。•(2)主机的转速与负荷控制•①转速程序控制:当对主机进行加速操纵时,应对加速过程的快慢有所限制,转速(或负荷)范围不同对加速过程的限制程度就不同,因此加速过程控制有下列两种形式:(1)发送速率限制;(2)程序负荷(也称负荷程序)。其中发送速率指的是主机在中速区以下的加速控制,加速速率较快,而程序负荷指的是高速区的加速控制,特别强调慢加速。•②转速一负荷控制:主机的转速与负荷控制回路是一个综合控制回路。在正常航行工况下,控制回路主要是通过调速器对主机转速进行定值控制。控制回路的作用就是克服各种扰动,把主机转速控制在车钟手柄所设定的转速上。但是,当船舶在恶劣海况下航行时,螺旋桨可能会频繁露出水面转速升高,若此时仍采用转速定值控制,调速器为了维持主机运行在设定转速上,不得不频繁地大幅度调节主机供油量,这就有可能导致主机超热负荷。一旦调速器减油不及时,主机就会发生飞车而使主机超机械负荷。这时,主机转速控制系统常采用负荷控制方式或死区控制方式来保障主机的安全运行。•③转速限制:为了保证主机安全、可靠及有效地运行,车令设定的转速值必须符合主机自身特性的要求,因此,遥控系统将对进入主机调速器的设定转速进行临界转速避让、最小转速限制、最大转速限制以及轮机长手动设定最大转速的限制。•④负荷限制:主机转速控制系统在对主机转速进行转速自动控制时,主机的供油量是由调速器根据偏差转速大小来控制的。调速器为了把主机的转速快速调节到设定转速,有可能使主机因供油量太大而超负荷。为此,遥控系统应对主机的供油量进行限制。负荷限制主要包括起动油量的设置、转矩的限制、增压空气压力限制、螺旋桨特性限制以及最大油量的限制。•(3)安全保护及应急操纵•①安全保护:如前所述,安全保护装置是主机遥控系统的重要组成部分,当主机重要参数越限时,它能使主机自动减速或自动停车,并发出报警信号并显示安全系统动作的原因,以保护主机的安全。有些重要参数的安全保护值有两个:一个是自动减速值,另一个是自动停车值。当出现安全保护装置动作且故障排除后,这时需要对故障复位才能进行起动和加速。•②应急操纵:在应急情况下,为了保证船舶的安全需要对主机进行一些特殊的操纵,主要包括以下三个方面。•a.机旁应急运行:在主机遥控系统失灵的情况下,为了保证主机仍然继续运行,只要将主机操纵部位从驾驶台或集控室直接切换到机旁,即可实现机旁手动应急操纵。•b.应急运行:在运行中的全速换向操作一般在紧急避碰中使用,属于应急运行。它包括应急换向、应急起动及应急加速。应急换向指的是主机在应急换向转速下的换向。应急起动除了采用重起动外还将自动取消慢转起动与时间起动。应急加速主要指的是取消负荷程序进行快加速,同时还自动取消某些限制(如增压空气压力限制,转矩限制等)。•c.手动应急停车:当车钟手柄扳回到停车位置,由于遥控系统出现了故障,不能使主机停油,这时应按下“应急停车”按钮,通过应急停车装置使主机立即断油停车,同时发出报警。若要重新起动主机,必需对应急停车信号进行复位,才可进行起动操作。•(4)模拟试验•各种主机遥控系统几乎都设置了相应的模拟试验装置。它主要用于显示遥控系统的运行工况,如电磁阀的状态、主机凸轮轴的位置以及起动过程等;测试和调整遥控系统的各种参数;检查遥控系统的各种功能是否正常,若有故障,可利用模拟试验来查找和判定故障部位•3.主机遥控系统的分类•主机遥控系统依据所采用的遥控设备及控制手段的不同可分为气动式主机遥控系统、电动式主机遥控系统、电-气式主机遥控系统、电-液式主机遥控系统和微机式主机遥控系统五类。第二节主机遥控系统的主要气动元部件•逻辑阀件实际上是一种开关元件。根据某些逻辑条件,其输出端或者通气源压力信号(简称输出为1),或者输出端通大气(简称输出为0)。逻辑元件包括两位三通阀、三位四通阀、多路阀、双座止回阀和联动阀。•(1)两位三通阀•两位三通阀有两个位置,三个通路,它是最常用的控制阀件,用来控制信号的通断。•(2)三位四通阀•在遥控系统中,三位四通阀常作为双凸轮主机的换向阀。•(3)多路阀•在遥控系统中,多路阀常作为双凸轮换向控制阀。•(4)双座止回阀•双座止回阀是或门阀,俗称梭阀,用它可实现或逻辑功能。•(5)联动阀•联动阀是与门阀,俗称双压阀,用它可实现与逻辑功能。•气动时序阀件在气路中,一般对气压信号的变化起延时作用,它包括单向节流阀、分级延时阀及速放阀。•(1)单向节流阀•单向节流阀和气容配合使用可以组成延时环节。•(2)分级延时阀•分级延时阀和气容配合使用可实现有条件的延时功能。•(3)速放阀•速放阀的在气动可起到快速泄放控制信号的作用,这就可避免了信号泄放的延时。•气动比例阀件的功能是,使输出的气压信号与输入的信号成比例的变化。它包括比例阀和转速设定精密调压阀。•(1)比例阀•比例阀的主要特点是输出与输入信号是相等的。在系统中通常起信号隔离作用。•(2)转速设定精密调压阀•在气动遥控系统中,转速设定精密调压阀用于设定主机转速,其输入信号是车钟手柄的位移,输出是与车钟手柄设定的转速所对应的气压信号。该阀的结构原理及输出特性如图5-2-4所示。滚轮1与车钟手柄下面所带动的凸轮相接触。当车钟手柄向加速方向扳动时,经滚轮使顶锥2下移,克服弹簧张力使滑阀3下移,进排气球阀4中的下球阀仍压在下滑阀5的阀座上,封住通大气口。上球阀会离开上滑阀3的阀座。气源P经上球阀与阀座之间的间隙与输出端B相通,输出气压信号增大。该增大的压力信号一方面作为转速设定信号输出;•另一方面经反馈孔(图中虚线所示)进入膜片6的上部空间,压缩弹簧7,使下滑阀连同球阀一起下移。当下滑阀的下移量(弹簧7被压缩量)与顶锥2的下移量相等时,上球阀又被压在上滑阀3的阀座上,截止气源P,使输出端B压力不再增加。可见,输出压力是与弹簧7的压缩量,亦即顶锥2的下移量成比例的。当车钟手柄向减速方向扳动时,在弹簧8的作用下,顶锥2、上滑阀连同进排气球阀一起上移,下球阀会离开阀座,使输出端B与大气口C相通,输出压力降低,经反馈孔使膜片6上部空间压力降低,靠弹簧7的张力使下滑阀上移,直到下滑阀的上移量与上滑阀的上移量相等时,下球阀又封住通大气口,使输出压力稳定在比原来低的数值上。•图5-2-4转速设定精密调压阀结构原理及输出特性图•图(b)示出了该阀的输出特性线。因为车钟手柄下面所带动的凸轮其正、倒车边是对称的,所以正、倒车转速设定的特性是一样的。调整螺钉10可调整弹簧7的预紧力,即可上下平移输出特性线,即旋紧螺钉10可向上平移输出特性线,即当车钟手柄设定在相同的速度挡时,其输出压力信号,也就是主机转速会有-定的增加;反之亦然。调换不同刚度的弹簧7,或改变它的有效工作圈数,可改变输出特性线的斜率。•在气动主机遥控中,常用3.0MPa的压缩空气作为换向和起动的动力气源,用0.7MPa的压缩空气作为其遥控气源。0.7MPa的遥控气源可由3.0MPa的空气瓶的压缩空气减压而获得,也可由单独的气源设备供给。但无论采用哪一种方式,为了保证气动主机遥控系统能正常工作,遥控气源必须是稳定而洁净的。它首先需经过净化处理,以滤去空气中的灰尘杂质,去除水分及油污,然后再经过稳压(减压)处理才可使用。鉴于遥控气源的重要性,遥控气源中的过滤器和减压阀常成双配备。第三节车钟系统及操纵部位的转换•车钟系统是用来发送主机操作指令和操作部位之间传递操作信息的装置,它是主机遥控系统的重要组成部分。大型船舶的车钟系统一般都由驾驶台车钟、集控室车钟和机旁应急车钟组成。•主机遥控系统的车令包括主车令、副车令及紧急操纵指令。主车令用于控制主机的转速和转向,通常用来发送主车令的装置有气起动遥控车钟和电动遥控车钟两种。但无论用哪一种,遥控车钟都是由车钟操纵部件、转向车令发讯及转速车令发讯三部分组成。它们的区别主要是:气动遥控车钟的转向发讯采用两个机控二位三通阀来实现转向信号的发讯,利用有无正、倒车气压来发讯正车、倒车和停车信号,转速发讯采用精密调压阀来发讯,利用精密调压阀的输出压力大小来给出设定转速的大小;电动遥控车钟的转向发讯常采用微动开关
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 dubihong
dubihong
本文标题:第九章船舶主机遥控系统
链接地址:https://www.777doc.com/doc-5061728 .html