您好,欢迎访问三七文档
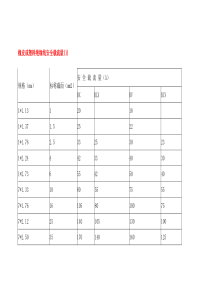
基于PredatorSFC系统的槽轮机构CAD/CAM创新实验---------------槽轮机构设计方案1.槽轮机构简介在图1中的外槽轮机构中,主动件拔盘以角速度w1匀速转动,当拔盘上的圆销转到图1所示的A位置时,拨盘上锁止弧S1的起使边到达中心连线O1O2位置,槽轮开始转动。当圆销转到A1时,拔销退出轮槽,拔盘继续转动,槽轮却停止转动,我们称此时的槽轮被锁住,槽轮上的内凹锁止弧和拨盘上的外凸锁止弧啮合在一起。这样,主动拨盘连续转动就转换成槽轮的间歇转动。为避免槽轮在起动和停歇时发生刚性冲击,拔销开始进入和离开轮槽时,轮槽的中心线应和圆销中心A的运动圆周相切,即拔销转到图1所示位置时,O1A⊥O2A。图1外槽轮机构组成:带圆销的拨盘、带有径向槽的槽轮。拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧,起锁定作用。工作过程:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动。ω2ω1o1o2锁锁止止弧弧槽槽轮轮拨拨盘盘圆圆销销1作用:将连续回转变换为间歇转动。特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。因槽轮运动过程中角速度有变化,不适合高速运动场合。2.槽轮机构优点(1)结构简单,工作可靠,效率较高;(2)在进入和脱离啮合时运动较平稳,能准确控制转动的角度;(3)转位迅速,从动件能在较短的时间内转过较大的角度;(4)槽轮转位时间与静止时间之比为定值。3.槽轮机构缺点(1)槽轮的转角大小不能调节;(2)槽轮转动的始、末位置加速度变化较大,从而产生冲击:(3)在工作盘定位精度要求较高时,利用锁紧弧面往往满足不了要求,而需另加定位装置。(4)槽轮的制造与装配精度要求较高。由于这些原因,槽轮机构一般应用在转速不高的装置中。4.槽轮机构的工作原理槽轮机构,又叫马尔他机构或日内瓦机构,由具有径向槽的槽轮1和具有拨销2的拨杆3组成,其工作原理如图2所示。2图2槽轮机构工作原理简图当拨杆转过一定的角度,拨动槽轮转过一个分度角,由图(a)所示的位置转到图(b)所示的位置时,拨销退出轮槽,此后,拨杆空转,直至拨销进入槽轮的下一个槽内,才又重复上述的循环。这样,拨杆(主动件)的等速(或变速)连续(或周期)运动,就转换为槽轮(从动件)时转时停的间歇运动。槽轮机构常采用锁紧弧定位,即利用拨杆上的外凸圆弧一锁紧弧A与槽轮上的内凹圆弧一定位弧B的接触锁住槽轮。图(a)所示为拨销开始进入轮槽时的位置关系,这时外凸圆弧面的端点F点离开凹面中点,槽轮开始转动。图(b)所示为拨销刚要离开轮槽时的位置关系,这时外凸圆弧面的另一端点E刚好转到内凹圆弧面的中点,拨杆继续转动,E点越过凹面中点,槽轮被锁住。图(c)为拨销退出轮槽以后的情况,这时,外凸圆弧面与内凹圆弧面密切接触,槽轮被锁住而不能向任何方向转动.由上述工作过程的要求,拨杆上的外凸圆弧缺口应对称于拨杆轴线。5.主要几何尺寸的设计公式图3为槽轮机构主要尺寸关系图。图中O1为拔盘中心,O2为槽轮中心,L1为拨销的轨迹半径;L2为槽轮半径;L3为中心距,h为槽轮槽深,rb为拨销半径,δ为间隙。3图3槽轮机构主要几何尺寸关系图设拔盘轴的直径为d.为避免槽轮在起动和停歇时发生刚性冲击,圆销开始进入和离开轮槽时,轮槽的中心线应和圆销中心的运动圆周相切,从而决定了槽轮机构主要尺寸之间的关系,根据图4所示槽轮机构的设计计算公式如下:4图4槽轮机构主要几何尺寸计算关系图(1)已知参数:槽轮槽数z,拨盘上圆销数目m,中心距C=O1O2,拨盘上圆销半径RT,拨盘转速n1(2)槽轮运动角:2β=2л/z(3)拨盘运动角:2α=л-2β(4)拨盘上圆销数目:m<2z/(z-2)(5)圆销中心轨迹半径:R1=Csin(β)(6)槽轮外径:R2=[(Csin(β))2+R2T]½(7)槽轮深度:h=R1+R2-C+RT+δ(8)拨盘回转轴直径:d1<2(C-R2)(9)槽轮轴直径:d2<2(C-R1-RT-δ)(10)拨盘上锁止弧所对中心角:γ=2(л/m–α)(11)锁止弧半径:R0=R1-b-RT5(12)槽轮每循环运动时间:tf=[(z-2)/z]30/n1(13)槽轮每循环停歇时间:td=[(2z-m(z-2))/(mz)]30/n1(14)槽轮机构的动停比k:k=(m(z-2))/(2z-m(z-2))(15)圆销中心轨迹半径R1与中心距C的比λ:λ=R1/C=sin(л/z)(16)槽轮角位移:Ф=arctg[γsin(θ)/(1-γcos(θ))-α≤θ≤+α(17)槽轮角速度:ω2=(λcos(θ)-λ)ω1/(1+λ2-2λcos(θ))(18)槽轮角加速度:ε2=(λ(λ2-1)sin(θ)ω21/(1+λ2-2λcos(θ)2)(19)槽轮最大角速度所在位置:θ=00一般δ的取值范围为3-6mm,当槽轮槽数z较大时。6.槽轮机构设计方案6.1方案1要求槽轮机构的动停比k=1/3设:槽轮槽数Z=4拨销m=1中心距C=70拨销半径RT=2mm销与槽底间隙δ=3槽齿宽b=5求解槽轮机构的尺寸参数:(1)槽轮运动角:2β=2л/z=2л/4=л/2(2)拨盘运动角:2α=л-2β=л/2(3)拨盘上圆销数目:m=1<2z/(z-2)=8/2=4(4)圆销中心轨迹半径:R1=Csin(β)=70×SIN(45)=49.5(5)槽轮外径:R2=[(Csin(β))2+R2T]½=[49.52+4]1/2=49.54(6)槽轮深度:h=R1+R2-C+RT+δ=49.5+49.54-70+2+3=34(7)拨盘回转轴直径:d1=12<2(C-R2)=2(70-49.54)=40.9(8)槽轮轴直径:d2=12<2(C-R1-RT-δ)=2(70-49.5-2-3)=31(9)拨盘上锁止弧所对中心角:γ=2(л/m–α)=3л/2(10)锁止弧半径:R0=R1-b-RT=49.5-5-2=42.5(11)槽轮机构的动停比k:k=(m(z-2))/(2z-m(z-2))=2/(8-2)=1/36(12)圆销中心轨迹半径R1与中心距C的比λ:λ=R1/C=sin(л/z)=SIN(л/4)=0.7076.2方案2要求槽轮机构的动停比k=1设:槽轮槽数Z=4拨销m=2中心距C=70拨销半径RT=2mm销与槽底间隙δ=3槽齿宽b=5求解槽轮机构的尺寸参数:(1)槽轮运动角:2β=2л/z=2л/4=л/2(2)拨盘运动角:2α=л-2β=л/2(3)拨盘上圆销数目:m=2<2z/(z-2)=8/2=4(4)圆销中心轨迹半径:R1=Csin(β)=70×SIN(45)=49.5(5)槽轮外径:R2=[(Csin(β))2+R2T]½=[49.52+4]1/2=49.54(6)槽轮深度:h=R1+R2-C+RT+δ=49.5+49.54-70+2+3=34(7)拨盘回转轴直径:d1=12<2(C-R2)=2(70-49.54)=40.9(8)槽轮轴直径:d2=12<2(C-R1-RT-δ)=2(70-49.5-2-3)=31(9)拨盘上锁止弧所对中心角:γ=2(л/m–α)=л/2(10)锁止弧半径:R0=R1-b-RT=49.5-5-2=42.5(11)槽轮机构的动停比k:k=(m(z-2))/(2z-m(z-2))=4/(8-4)=1(12)圆销中心轨迹半径R1与中心距C的比λ:λ=R1/C=sin(л/z)=SIN(л/4)=0.7077.方案1槽轮三维模型7图5槽轮三维模型7.1方案1槽轮设计图纸(1)槽轮图6槽轮部分8(2)拨盘槽轮机构的拨盘部分起驱动作用。本机构的拨盘如图7所示,本结构分2层,上层起驱动左右,下层起连接槽轮的作用。两层圈盘实为一体。图7拨盘部分(3)槽轮的装配如图8所示,槽轮机构要装在一底板上并加以固定。图上销的作用为连接机构和底板。9图8槽轮机构的装配图8.槽轮机构的配合和表面粗糙度(1)参照刀尖圆角来设计工件圆角,未注倒角C0.2—0.8,未注圆角R0.2—0.8。(2)表面粗糙度配合面和滑动面Ra12.5,可见加工痕迹,一般用于没有相对运动的配合面。其它表面Ra25,为达到一般容许公差而切削后自然得到的表面,接触状态要求稳定的面,常见用手接触的面。Ra6.3(微见加工痕迹)和Ra3.2(不见加工痕迹)用于相对运动速度不高的接触面,要精车、精铰、精镗和精铣。(3)拨盘和槽轮孔与轴低速旋转,拨销与槽低速相对运动,用间隙配合H8/f7。(4)没有相对运动的配合,因受力较小,用小的过盈配合H7/h6(5)槽轮外轮廓与拨盘凹弧的配合是H9/e9,大的间隙配合。(6)中心距公差是±0.02到±0.03。9.槽轮机构的运动分析109.1外槽轮机构角速度和角加速度的分析假设槽轮机构在工作的某一状态时的工作简图如图2-1的(a)所示,其对应的状态矢量见图9的(b)所示,O1为槽轮中心,O2为拔盘中心,E1为槽轮开始进入运动时的圆销中心的位置,E为槽轮在运动中的任一位置,角速度和角加速度曲线见图10所示。图9槽轮机构工作简图以及矢量分析图图10槽轮的角速度曲线图(a)和角加速度曲线图(b)(1)槽轮机构运动起来是做变加速运动,槽轮机构的最大角速度出现在θ11=0位置。(2)在拨销进入与脱离轮槽的瞬间,槽轮速度为零,但加速度不为零,所以产生柔性冲击。(3)槽轮机构的角速度和角加速度的变化取决于槽数z。(4)在选择槽数时,应该综合考虑多种因素。对于槽轮机构,槽数越少则工作效率越高,一方面,槽数越少角加速度变化越大,运动平稳性能差,槽轮机构的振动、冲击和噪声将随之加大;另一方面,随着槽数的增加,槽轮的结构尺寸将加大,从动端的惯性力矩也随着加大。同时当槽数z大于9时,槽轮机构的动停比K变化趋于平稳,动力特性的改善也明显减弱,但随着槽数增加将给机构的设计带来的困难将越大。因此,在实际应用中,槽轮机构的槽数多在4到8范围内。10.槽轮机构创新10.1槽轮机构的应用和研究现状槽轮机构结构简单、工作可靠、从动件的运动能够较准确地控制等优点,在工业生产中广泛地应用于较少工位的间歇转位机构和步进机构中。但传统的槽轮机构存在有以下两个缺点:(1)动力特性差。槽轮在进入啮合和退出啮合瞬间,拨销的向心加速度使槽轮角加速度发生突变,从而出现柔性冲击;在槽轮转动过程中加速度变化的瞬间,由于间隙的存在,出现横越间隙的冲击;转动过程中最大角加速度也较大。(2)分度数与动停比有确定的关系,动停比无选择余地。由于槽轮机构的角速度曲线连续,因此,只要制造和装配精度能够保证,一般来说,基本不存在刚性冲击。对槽轮机构的研究主要集中在机构的改进方面,以槽轮机构为基本机构(除机架和原动件外还具有零个或一个杆组的机构称为基本机构),在此基础上串联槽轮机构或其它基本机构以得到连续的角加速度曲线,从而避免柔性冲击,改善机构的动力性能。多年来,提出了一些槽轮机构的改进方案,如两级串联式槽轮机构、行星轮驱动的槽轮机构、完整齿轮和非完整齿轮驱动的槽轮机构、椭圆齿轮驱动的槽轮机构、连杆机构驱动的槽轮机构等组合式12槽轮机构。其中行星轮驱动的槽轮机构结构简单,对动力特性有相当的改进效果,也扩大了动停比的选择范围。但对这种机构的运动学分析和参数分析还有待深入,该机构的潜力也未得到充分的发掘与认识。为适应间歇运动高速化的要求,出现了各种分度凸轮机构。但是这类机构尚有两个缺点:(1)它们是高副机构,较易磨损;(2)制造技术复杂。10.2创新机构10.2.1紧锁槽轮机构槽轮机构的旋转曲柄上有一驱动滚子,当它进入一个槽时,输出轮就会迅速地转位。如图11所示,锁止杆上的圆滚与槽相啮合以防止槽轮不转位的移动。图11紧锁槽轮机构10.2.2行星齿槽轮机构当驱动齿轮用在锁止盘上的一个单齿驱动行星齿轮时,输出杆保持静止。锁止盘是行星齿轮的一部分,它与环行齿槽轮相啮合,使输出杆转动一个位置,如图12所示。13图12行星齿槽轮机构10.2.3双槽轮驱动第一个槽轮的从动部分是第二个槽轮的驱动部分。这样产生一个较宽输出转动变化范围,这个输出转动包括两个快速转位之
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
![关于调整完善资源综合利用产品及劳务增值税政策的通知财税[XXXX]115](/doc-482278.png)
 btranjiao
btranjiao
本文标题:槽轮机构设计方案
链接地址:https://www.777doc.com/doc-5475788 .html