您好,欢迎访问三七文档
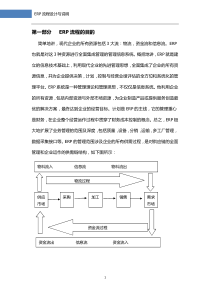
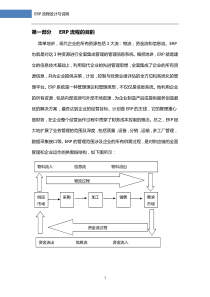
2009-10-191第一章绪论汽车系统动力学的研究内容1.轮胎动力学2.汽车纵向动力学3.横向动力学4.垂向动力学5.多刚体动力学建立汽车纵向动力学、横向动力学、垂向动力学的运动方程和数学模型,分析汽车的加速性能、制动性能、操纵稳定性和平顺性及性能的评价、主要影响因素和改善,并研究各种控制方法。2009-10-192第四章汽车横向动力学问题的提出:随着科学技术的进步和人民生活水平的提高,消费者对汽车安全性的关注越来越多,如何提高安全性是现代汽车研究的重要课题之一。汽车的安全性主要包括两个方面:主动安全性和被动安全性。主动安全性--如何通过车辆的设计尽量减少或避免交通事故的发生;被动安全性--通过车辆的设计使车辆在发生事故时尽量减小对乘员的伤害。发展趋势--电子控制装置应用于汽车,提高了汽车的主动安全性。请看动画吧!事故后安全和生态安全。2009-10-193主要内容第四章汽车横向动力学4.1汽车转向系统数学模型一、自由度分析二、二自由度汽车模型三、三自由度模型四、四自由度汽车模型五、多自由度汽车模型2009-10-194第四章汽车横向动力学汽车转向系统动力学是研究驾驶员给系统以转向指令后汽车在曲线行驶中的运动学和动力学特性。这一特性影响到汽车操纵的方便性和稳定性,所以也是汽车安全性的重要因素之一。作为系统的输入可以是转向盘上力输入,也可以是角输入,系统的输出是系统的稳态响应和瞬态响应,如图4-1-1所示。2009-10-195第四章汽车横向动力学γυqpwV()()()∑∑∑=⋅+⋅−=⋅+⋅−=⋅+⋅−zsysxsFpqVwmFVpwmFqwVmυγυγυ&&&√×√×√√()()∑∑∑∑===⋅+=⋅−zzxxysxsMIMpIFVmFVmγγυγυ&&&&∑∑∑=−−=−−=−−zyxzyxzyxzyxMpqIIIMpIIqIMqIIpI)()()(γγγ&&&√×√×√×直线制动:转向时:一、横向运动自由度分析xzυVwqpry2009-10-196第四章汽车横向动力学二、两自由度汽车模型(即角位移输入下的响应)汽车只作平行于路面的平面运动,并考虑了轮胎侧偏特性。假定:1)汽车无垂直方向运动,也无绕y轴和x轴的俯仰和侧倾运动;2)汽车作等速运动,不考虑切向力和空气动力的作用;3)忽略转向系统影响,直接以前轮转角作为输入;4)不考虑左右车轮由于载荷变化引起轮胎特性变化和回正力矩的作用。两轮摩托车模型具有侧向和横摆运动两自由度,则横向运动方程可简化为:2009-10-197第四章汽车横向动力学()()∑∑∑∑===⋅+=⋅−zzxxysxsMIMpIFVmFVmγγυγυ&&&&()∑∑==⋅+zzysMIFVmγγυ&&前后轮胎侧偏角:21221121ybyazyyyFLFLMKKFFF−=+=+=∑∑αααα其中:2009-10-198第四章汽车横向动力学1V2VV2009-10-199第四章汽车横向动力学δβυγα−+=aL1υγβαbL−=2()()∑∑∑∑===⋅+=⋅−zzxxysxsMIMpIFVmFVmγγυγυ&&&&()∑∑==⋅+zzysMIFVmγγυ&&前后轮胎侧偏角:21221121ybyazyyyFLFLMKKFFF−=+=+=∑∑αααα其中:2009-10-1910第四章汽车横向动力学则可得:()()()υγυδυγβααααα&&+=−−++sbamKKLKLKK12121()()γδυγβααααα&zababaIKLKLKLKLKL=−−+−122122122122121/)(1/KuLuukLkLLmLuSr+=−+=⎟⎠⎞δω解方程,则有消除,υ稳定性因数考虑整车,其侧偏角应如何得到?)(12212kLkLLmK−=其中:2009-10-1911第四章汽车横向动力学υu2δ1δXYV11α12αγγννγννbauuu−=+===2121112111112111122νννγγ==+==BuuBuu-222212222222122νννγγ==+==BuuBuu-2B1BaLbL2009-10-1912第四章汽车横向动力学三、三自由度模型当汽车不是匀速前进时,则x方向会有运动,如加速或减速情况下的转向运动,其运动方程为:()()∑∑∑∑===⋅+=⋅−zzxxysxsMIMpIFVmFVmγγυγυ&&&&()()∑∑∑==⋅+=⋅−zzysxsMIFVmFVmγγυγυ&&&2009-10-1913第四章汽车横向动力学四、四自由度模型假设在二自由度模型假设前三条基础上,还有如下两点:⑴忽略转向轮绕主销转动与整车运动及自身滚动间的藕合效应,忽略转向盘至转向轮之间传动部件的惯性及阻尼;⑵认为侧倾轴近似处于水平位置,悬架弹性处于线性范围。目的是:①计入前轮绕主销运动的惯性及阻尼,以及转向系的综合刚度;②计入悬架弹性、阻尼以及前、后轴侧倾转向效应的影响。为了研究转向系及悬架性能对汽车操纵运动的影响,可以在线性二自由度模型基础上增加两个自由度:前轮绕主销转向角和车身侧倾角。侧向速度和横摆角速度前轮摆振怎样确定的?实际上呢?为什么?2009-10-1914第四章汽车横向动力学这样可以得到一个四自由度线性系统,以转向盘转角为输入,以横摆角速度、重心处侧偏角、车身侧倾角及前轮转向角为输出。SWδrβδφ()∑∑∑===⋅+zzxxysMIMpIFVmγγυ&&&11)(ξδδδδ′−−=+YiCCISWSWw&&pErVbkYErVakYYiCCIghMCCpDDrhVMrIpIYbYapIrIYYphMrmVrrSWSWwSrfSXZXXZZS=−−=−−+=′−−=+−+−+−=+−+−−−=++=−+ϕϕβϕδβξδδδδϕβξξβϕϕ&&&&&&&&&&)()()()()()()()()(22111121221121xzυVwqpry2009-10-1915第四章汽车横向动力学悬架上质量质心至侧倾轴距离悬架上质量M整车质量悬架上质量对车辆坐标系X轴的转动惯量MS整车绕车辆坐标系Z轴的转动惯量前轮侧偏刚度悬架上质量对车辆坐标系X轴、Z轴的惯性积后轮侧偏刚度两转向轮绕各自主销转动惯量之和h前悬架弹簧侧倾刚度后悬架弹簧侧倾刚度前轮侧向力对主销轴的力臂转向系综合刚度前轮轮胎拖距前轮侧向力后轮轮胎拖距后轮侧向力前悬架侧倾转向系数车身侧倾角速度后悬架侧倾转向系数后悬架侧倾阻尼系数前悬架侧倾阻尼系数转向系传动比XIZIXZIWI1ξ2ξfErEWC1ξ′i转向轮绕主销的阻尼系数1kSC1Y2YprDfD2k1ϕC2ϕC2009-10-1916第四章汽车横向动力学五、多自由度汽车模型空间的任意一刚体,都有六个自由度。因此,整个汽车共有30个自由度(注:只按车身和四个车轮)。汽车本身的特性,除前面列举的以外,还有如轮胎侧偏特性对轮荷的依赖性,及对驱动力、制动力的依赖性,车轮的非稳态特性,悬架机构的几何关系的非线性,车身的空气动力学特性,欲分析这些特性对汽车运动的影响,必须建立多自由度的非线性的汽车模型。对这种多自由度汽车模型的利用,只有依靠计算机进行数值分析,因此这种分析就不能像简单模型的理论分析那样,能得到普遍适用的结论,而必须针对具体车型而给出有针对性的个别适用的结论。2009-10-1917第四章汽车横向动力学下面我们了解一下汽车操纵稳定性几种试验及其评价指标,该试验借助ADAMS软件仿真完成。汽车时域响应分为稳态响应和瞬态响应。0r1r)(tr095.0r005.1rTτεσt?反应时间τ稳定时间σ超调量%10001×rr滞后时间ε2009-10-1918第四章汽车横向动力学转向盘角阶跃输入下进入的稳态响应:等速直线行驶,急剧转动转向盘,然后维持转角不变,即对汽车施以转向盘角阶跃输入,汽车经短暂的过渡过程后进入等速圆周行驶工况。转向盘角阶跃输入下的瞬态响应:等速直线行驶和等速圆周行驶两个稳态运动之间的过渡过程所对应的瞬间运动响应。稳态转向特性:不足转向、中性转向、过度转向。转向盘保持一个固定转角不变,缓慢加速或以不同车速等速行驶时,不足转向的汽车转向半径逐渐增大,中性转向的汽车转向半径不变,而过度转向的汽车转向半径逐渐减小。2009-10-1919第四章汽车横向动力学1.稳态回转评价指标:中性转向点的侧向加速度、不足转向度和车厢侧倾度。①中性转向点的侧向加速度前、后桥侧偏角差与侧向加速度关系曲线上,斜率为零处的侧向加速度。②不足转向度前、后桥侧偏角差与侧向加速度关系曲线上侧向加速度值为2m/s^2处的平均斜率。③车厢侧倾度车厢侧倾角与侧向加速度关系曲线上侧向加速度值为2m/s^2处的平均斜度。半径为15~20m2009-10-1920第四章汽车横向动力学2009-10-1921第四章汽车横向动力学2.转向回正评价指标:松开方向盘3s时残余横摆角速度绝对值及横摆角速度总方差。有低速回正试验和高速回正性(最高车速超过100km/h的汽车)试验。按左、右转向两个方向进行。2009-10-1922第四章汽车横向动力学3.转向轻便性评价指标:松转向盘平均操舵力与转向盘最大操舵力。2009-10-1923第四章汽车横向动力学4.单移线2009-10-1924第四章汽车横向动力学5.双移线2009-10-1925第四章汽车横向动力学6.角阶跃输入侧向加速度横摆角速度2009-10-1926第四章汽车横向动力学7.角阶跃输入(翻车)8.蛇行2009-10-1927第四章汽车横向动力学主要内容一、驱动或制动时的汽车的力学模型及运动方程式二、驱动或制动时的转向特性4.2存在驱动或制动时的汽车的转向运动2009-10-1928第四章汽车横向动力学一、驱动或制动时的汽车的力学模型及运动方程式建立汽车在驱动或制动时的转向运动模型,通常在如下两个前提条件下进行:①整车质心高于轮胎接地面;②轮胎与地面间的切向力可在零与附着极限之间整个范围内变化,轮荷和纵向力的变化将引起轮胎侧偏特性的变化。2009-10-1929第四章汽车横向动力学2009-10-1930第四章汽车横向动力学考虑车身六个运动自由度的模型简图,整车的六个运动方程为:∑∑∑=+=⋅+=⋅−zisyixiFmgdtdwmFrudtdvmFrvdtdum)()(2)(2)()()()(43214321rzzfzzryyfyyssxzxbFFbFFhFFhFFhrudtdvmdtdrIdtdpI⋅−+⋅−+⋅++⋅+=⋅+−⋅−⋅∑∑+⋅−+⋅−+⋅+−⋅+=⋅−⋅⋅−⋅++⋅+−=⋅⋅−+⋅zirxxfxxryyfyyxzzRCxirzzfzzssyMbFFbFFlFFlFFdtdpIdtdrIhFlFFlFFhrvdtdumdtdqI2)(2)()()()()()(3412432143212009-10-1931第四章汽车横向动力学二、驱动或制动时的转向特性汽车的不足-过度转向特性取决于很多因素,但轮胎的侧偏特性是最主要的。而轮胎的侧偏特性又受车轮上纵向力和垂直负荷的影响。由轮胎侧偏特性理论可知,同一侧向力,当轮荷较大时对应的侧偏角较小,当纵向力较大时对应的侧偏角较大。注意:当汽车进行驱动或制动时,不但使各轮上纵向力发生变化,也通过轮荷移动使各轮上的垂直负荷发生变化。因此,在分析驱动或制动时汽车的不足-过度转向特性时,必须考虑纵向力和垂直负荷这两部分影响的综合效果。在湿路面上,由于轮荷转移较小,轮胎接地状态离附着极限很近,因此纵向力的影响有决定性意义。2009-10-1932第四章汽车横向动力学(1)只考虑纵向力的影响(2)悬架的侧倾转向效应正常圆周行驶情况下,后轮具有不足转向倾向的设计,在转弯制动工况下反而有过度转向倾向。这是因为后悬架的变形在制动时与正常圆周行驶时不同,制动时由于车身前倾使后悬架大幅度伸张的缘故。当前轮的驱动力或制动力分配较大时,同一侧加速度即前后轮侧向力不变的情况下,前轮侧偏角增大而后轮侧偏角减小,从而增加不足转向的倾向;当后轮的驱动力或制动力分配较大时,后轮侧偏角增大而前轮侧偏角减小,因而减小不足转向的倾向。2009-1
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 haze1207
haze1207
本文标题:4-汽车横向动力学
链接地址:https://www.777doc.com/doc-5619740 .html