您好,欢迎访问三七文档
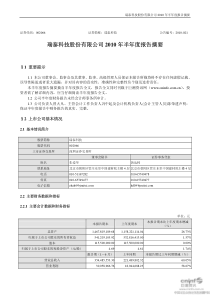
北京邮电大学传感器系统综合设计基于微控制器的风力风向传感器系统设计1、被测量分析风是空气流动时产生的一种自然现象。空气流动有上下流动和左右流动,上下流动为垂直运动,也叫对流;左右流动为水平运动,也就是风。风是一个矢量,用风向和风速表示。地面风指离地平面10─12米高的风。风向指风吹来的方向,一般用16个方位或360°表示。以360°表示时,由北起按顺时针方向度量。风速指单位时间内空气的水平位移,常以米/秒、公里/小时、海里/小时表示。1805年英国人蒲福根据风对地面(或海面)物体的影响,提出风力等级表,几经修改后得下表。目测风时,根据风力等级表中各级风的特征,即可估计出相应的风速。风力等级名称相当于开阔平坦地面10米高处风速浪高陆上物理征象米/秒公里/时海里/时(米)0静风0-0.211-静,烟直上。1软风0.3-1.51-51-30.1烟能表示风向,但风向标尚不能指示风向。2轻风1.6-3.36-114-60.2人面感觉有风,树叶有微响,风向标能随风转动。3微风3.4-5.412-197-100.6树叶与微枝摇动不息,旌旗展开。4和风5.5-7.920-2811-161.0灰尘和碎纸扬起,小树枝摇动。5清劲风8.0-10.729-3817-212.0有叶的小树枝摇动,内陆水面有小波浪。6强风10.8-13.839-4922-273.0大树枝摇动,电线呼呼有声,打伞困难。7疾风13.9-17.150-6128-334.0全树摇动,逆风步行感到困难。8大风17.2-20.762-7434-405.5树枝折断,逆风行进阻力甚大。9烈风20.8-24.475-8841-477.0发生轻微的建筑破坏。10狂风24.5-28.489-10248-559.0内陆少见,有些树木拔起,建筑物破坏较重。11暴风28.5-32.6103-11756-6311.5极少遇到,伴随着广泛的破坏。12飓风14.02、发展历史及其现状传统的测量方法主要用风杯来测量风速,用风向标测量风向。这些机械装置体积大、价格昂贵,且具有移动部件,维护不便。近20年来,微电子机械系统(MEMS)的发展为风速传感器的发展带来了新的突破口。基于微机械加工技术的热式风速传感器可以同时完成风速风向的测量,且具有精度高、体积小、功耗低、不易损坏等优点。随着微电子和微加工技术的不断进步,MEMS传感器根据摩尔定律按比例不断缩小。然而,由于热风速传感器结构的特殊性,将MEMS传感器与接口电路单片集成并不会显著降低整个测量系统的成本,而且需要较高的研发周期。3、传感器设计思路本传感器基于SiliconLabs公司的增强型的5l系列单片机C8051F350微控制器的热风速风向传感器系统设计方案。在该测量系统中,采用恒温差控制模式,热温差工作原理进行测量。热式风传感器由于采用热原理进行检测,存在很大的温漂问题。为使测量系统能够在—40—60oC的宽温度变化范围内均能正常工作,本文在恒温差控制中采用了硬件与软件相结合的方式对系统进行了温度补偿。这样可以很好地抑制温漂,同时灵敏度和检测量程得到了优化。4、传感器的结构及工作原理说明4.1工作原理目前,热风速风向传感器工作原理主要包括热损失型和热温差型。热温差型的工作原理是检测由流体造成芯片表面上、下游温度变化的差值来反应风速和风向。基于这种测量原理的风速计的特点在于能够同时测量风速和风向,其对小风速进行测量时具有较大的灵敏度,但在对高风速进行测量时,由于上游温度不可能比环境温度更低,而下游温度不可能比加热条温度更高,所以温度差δT会饱和,在测量风速的时候量程受限。如图1所示的二维热温差型风速计芯片,其横向尺寸为L,厚度为D。由于LD,陶瓷基板在厚度方面的温度梯度可以忽略。当风速为U时,流体感生的温度梯度δT分解成如下形式:δT∆T⁄=F(U)G(ϕ)式中:F(U)为一维情况下,芯片的温度梯度关于风速的灵敏度函数,G(ϕ)为温度梯度关于风向的灵敏度函数,∆T为芯片与环境之间的温度差,δT为芯片内部测温元件之间的温度梯度。在恒温平板近似情况下,可以得到风速和风向灵敏度的解析函数分别为:F(U)=δT∆T⁄=ckaLkcD(L2μα⁄)13⁄√UG(ϕ)=cos(ϕ)式中:ka和kc,分别是空气和陶瓷基板的热导率,ϕ和ϕ分布为流体的黏度和热扩散率。由式可以看出,风速灵敏度与芯片的厚度和热导率成反比,而风向灵敏度近似为正弦函数。上式对风速风向传感器的设计提供了设计依据。在恒温差控制模式下,二维风速风向传感器的实现可以利用两组相互垂直放置的测温电阻构成惠斯通全桥来完成。在考虑传感器电学和热学的失配时,惠斯通全桥的输出可以写成:VNS=ANS×cos(ϕ−ϕ0)+aNSVEW=AEW×sin(ϕ−ϕ0)+aEW式中:ANS和AEW分别为正弦和余弦曲线的幅值,aNS和aEW分别为风速信号的失调项,ϕ0是风向信号的失调项。下标EW、NS分别代表垂直方向和水平方向。4..2结构为了简化封装和提高灵敏度,在陶瓷基板上设计了一种如图l所示结构的二维风速风向传感器,该传感器结构在芯片中央集成了加热电阻Rh和芯片测温电阻Rs。两者相互环绕,温度可以视为相等,同时又可以保持电学特性的相互独立,从而在恒温差控制电路设计时具有更大的自由度。图1二维风速风向传感器示意图对于热温差测量,加热电阻和测温电阻之间的距离对传感器的灵敏度和量程均有很大影响。我在距离加热电阻不同位置上集成了两组测温电阻,并将两组惠斯通半桥反向相接,形成如图2所示的全桥电路。如此设计的传感器结构灵敏度为半桥结构的近2倍,而且还可以对传感器的灵敏度和测量范围进行优化设计。图2二维风速风向传感器惠斯通全桥连接方式5、检测电路考虑到本传感器中加热电阻和测温电阻电学特性上完全分离,温度可以视为相等。本文提出了一种如图3所示的新型软硬件相结合的恒温差控制电路。其包括四部分:电流源偏置的惠斯通电桥、差分运算放大器、加热电阻驱动部分、失调电压调整电路。其中,I2为硬件电流源,I1由Ii1和Ii2两部分电流组成,Ii1为硬件电路提供的具有正温度系数的电流,Ii2为比I2小的硬件电流源,提升R3的电位,位于芯片上的测温电阻Rs利用电流源I2偏置。三极管Q1将运算放大器的输出电压转换成电流,并驱动加热电阻Rh。图3风速风向传感器的恒温差电路在非测量状态下,D/A的输出电流IDA设定为零,运算放大器的输出接近地,加热电阻Rh上的电流为零,系统保持低功耗模式。测量时为使传感器实现恒温差控制,MCU将电流IDA设定为I0,从而使得三极管Q1开启,加热电阻Rh以功率Po加热。根据传热学定律,传感器耗散功率与温度差成正比,而在动态平衡条件下,加热功率与耗散功率始终相等,从而通过设定D/A输出电流可以将芯片温度提升到设定温度T0。在相同的加热功率情况下,当环境温度增加时,芯片的实际温度将高于设定温度T0,从而使得芯片测温电阻RS高于设定值。为了保持惠斯通电桥的平衡,需要通过提升D/A输出电流来抬升参考电位,从而保持传感器工作在恒温差工作模式下。在测量状态下,当风吹过传感器芯片,芯片的温度将会下降,测温电阻RS也将下降。由于敏感信号端与运算放大器的负端相接,惠斯通电桥的电压信号经差分放大后将上升,从而使得加热功率上升,最终保持传感器温度高于环境温度一个固定量。6、补偿的考虑由于本检测系统采用热式传感器,利用铂电阻对芯片表面的温度场进行感应,而铂电阻存在较大的温度系数,如果测量系统没有任何的温度补偿,当环境温度变化时系统出现测量偏差,温度变化较大情况下测量系统甚至无法使用,因此需要对该测量系统进行温度补偿。图3中,参考电阻R3结合Ii1构成具有正温度系数的电压,抵消由环境温度变化引起惠斯通电桥的偏差量。D/A的输出电流为温度补偿的微调项,随环境温度变化使得运算放大器的输出稳定在固定值,从而实现恒温差控制,因此不同的环境温度对应于不同的D/A输出电流。7、重要参数介绍传感器的加热电阻和测温电阻之间的位置对传感器性能有很大影响。对传感器进行优化设计时,需要对不同风速风向条件下对传感器进行热域、流体域和电能域等多能域耦合模拟,从而得到芯片表面温度场分布。图4所示为热风速传感器结构简化ANSYS模型。其中,传感器芯片尺寸为4mm,陶瓷芯片和空气流动的厚度分别为0.25mm和0.5mm。传感器芯片中央的加热电阻尺寸为0.5mm,加热电阻和测温电阻之间的距离△L从0.1mm增加到O.5mm。在ANSYSCFX中,空气和芯片被定义液体和固体,而两者之间的界面定义为流固界面(FSI)。气体的性质定义为不可压缩流体,环境温度设为27℃。假定传感器工作恒温差方式下,将芯片加热电阻温度设为77℃。一旦流入和流出的边界条件设定,传感器与表面气体温度分布就可以利用静态仿真得到。图4热风速风向传感器的ANSYS模型对传感器表面的温度分布进行采样分析,可以得到不同此时芯片温度差与风速之间的关系。如图5所示,随着风速的增加,芯片表面迎风与背风测温电阻之间的温度差增大,直至饱和。模拟结果表明,当距离较小时,在低风速情况下,传感器可以得到较高的灵敏度,而量程受限。距离增大时,传感器得到较大的量程。经过优化设计,得到如图6所示的传感器,其设计的两组测温电阻与加热电阻之间的距离分别为0.1rain和0.5mill。图5不同△L时,传感器芯片内温度差随风速变化曲线图6优化设计后的传感器版图8、应用描述本传感器可精确检测风力与风向。其应用范围相当广泛,可广泛应用于温室、环境保护、气象站、船舶、码头、重机、吊车、港口、码头、缆车、任何需要测量风速风向的场所
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 tissot1853
tissot1853
本文标题:传感器系统综合设计
链接地址:https://www.777doc.com/doc-5722615 .html