您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 项目/工程管理 > 异步电动机直接转矩控制系统的仿真研究
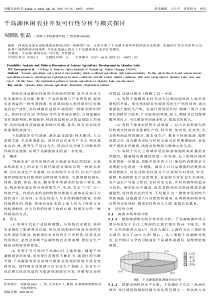
异步电动机直接转矩控制系统的仿真研究作者(上海交通大学,上海,邮编:200030)摘要:针对异步电机交流调速系统的特点,采用了直接转矩控制(DTC)交流变频调速方案。直接对电机定子磁链和电磁转矩进行控制,避免了矢量控制中复杂的变换和参数运算,使控制结构变得十分简单。应用MATLAB/Simulink对直接转矩控制的定子磁链近似圆形控制的方法进行了仿真,从理论上证明了这种方法的可行性,并且对仿真波形进行分析,验证系统的正确性;关键词:直接转矩;MATLAB/Simulink;异步电动机Researchonasynchronousmotordirectself-controlsystemsimulationXxx(ShanghaiJiaoTongUniversityShanghaiPostcard200030)Abstract:InviewofthecharacteristicsofstorageAsynchronousmotordrivesystemusinganadvancedACfrequencyconverterprogram:DirectTorqueControl(DTC),whichdirectlytocontrolthemotorstatorfluxandtorque,themethodofDTCavoidthecomputationalcomplexityofthetransformationparameters,whichcontrolstructureisverysimple.ThesimulationmodelsofapproximatecirclefluxcontrolsystemarepresentedbasedontheapplicationofMATLAB/Simulinkbytheauthor.Thefeasibilityandcorrectnessofthismethodaretestifiedintheoryandthecorrelativewaveformswhichcanexplaintheadvantageofsystemarecaptured.KeyWord:DTC,MATLAB/Simulink,Asynchronousmotor1引言1985年德国鲁尔大学MDepenbrock教授首次提出了直接转矩控制(DTC)理论。该理论的核心是摒弃了矢量控制技术中过于繁杂的解耦思想,简单地借助三相定子电压和电流在静止坐标系中直接计算磁链和转矩,与给定值进行比较后,再通过两点式或多点式调节控制实现高性能的调速控制。它在很大程度上解决了矢量控制中计算控制复杂、特性易受电动机参数变化的影响、实际性能难于达到理论分析结果等一些重大问题。直接转矩控制直接在定子坐标系下分析交流电动机的数学模型、控制电动机的磁链和转矩,不像矢量控制,将交流电动机与直流电动机作比较、等效和转化,更不需要模仿直流电动机的控制而要求利用解耦后的简化交流电动机数学模型来实现对转矩的间接控制,使系统结构变得十分简单,更为容易实现。2异步电动机数学模型电路是在正交定子坐标系(坐标系)下描述异步电动机的,各量的意义如下:su:定子电压空间矢量si:定子电流空间矢量ri:转子电流空间矢量:定子磁链空间矢量r:转子磁链空间矢量:电角速度(机械角速度与极对数之积)异步电动机在定子坐标系下的特性可用如下方程式表示:ssiRsu(1)rrrrjiR(2)定子磁链与转子磁链由下式获得:Li(3)因为rriLj(4)所以rriL(5)定子旋转磁场提供的功率如下:)+(=sssdSiiiTP23}Re{23(6)式中s――定子旋转磁场的频率,系数3/2是在将3相变换为2相时为保持功率相等所需要的系数,且)+(jisiLj(7)由此方程可得出下面两个方程式:s=-Lij(8)s=Lij(9)将式(5)和式(6)代入式(3),得转矩)(=ssiiT23d(10)如果用转子磁链代替定子电流,转矩方程式将变为简明的形式。rsiii(11))(1)(11)(1)(11rrrsrrrsLLLiiiLLLiii(12)代入式(13)得)(=rriLT231d(13)该公式表达的是定子磁链与转子磁链之间的交叉乘积,也可写成如下形式:sin231drLT=(14)式中――定子磁链与转子磁链之间的夹角,即磁链角。3逆变器的数学模型逆变器是交流调速系统中的重要部件,通过对逆变器的控制才能实现电机的调速。在直接转矩控制中采用的是电压型逆变器,它的结构如图1所示。+-UdcUdc/2Udc/2S1S3S5S4S6S2SaSbScM~0图1三相电压型逆变器4空间矢量电压对定子磁链、转矩的作用4.1空间矢量电压对定子磁链的作用逆变器的输出电压us(t)直接加到异步电动机的定子绕组上,则定子磁链s(t)与定子电压us(t)之间的关系为:dtRtitutssss))()(()((17)若忽略定子电阻Rs上压降的影响,则:dttutss)()((18)式(18)中定子磁链空间矢量s沿着电压空间矢量Us的方向,以正比于输入电压的速度移动,通过逐步合理地选择电压矢量,可以使定子磁链矢量s的运动轨迹纳入一定的范围,沿着预定的轨迹移动。θnsisr图2异步电动机定子磁链的轨迹图2所示是定子磁链矢量随着选择电压矢量的不同而运动的轨迹。通过选择合理的电压矢量,可使得磁链幅值在给定值s*和允许的偏差s的范围内变化,使其平均值基本保持不变。当合理地选择Us的施加顺序及时间比例,可形成多边形磁链轨迹,亦即逼近圆形轨迹。为了分析电压矢量Us对磁链控制的性能,将公式(18)离散化可得到:ssssTnunn)1()1()((19)式中,Ts为采样周期。在全数字化控制系统中,由于采样周期是固定的,磁链的波动范围也是一定的,是一个与采样周期成正比的量。采样周期越短,磁链的波动范围就会越小。用矢量三角形的方式描述公式(19),如图3所示,图中u为电压矢量与磁链矢量的夹角。通常采样周期Ts为10us级或100us级,所以)1()(nnsssψψ(20)显然,当0u时,s为最大。sdcsTU32max(21)式(21)说明磁链的波动是比较小的,当缩小采样周期时,磁链波动还可以进一步减少。磁链控制得越好,电流谐波就会越小,转矩的脉动也会越小,从而就会得到更好的控制性能。另外,分析式(20)可得出电压矢量对定子磁链的影响:(1)u/2,s0,施加零电压矢量,定子磁链的幅值基本不变。(2)u/2,s0,施加指向圆外的电压矢量,定子磁链的幅值增加。(3)u/2,s0,施加指向圆内的电压矢量,定子磁链的幅值减少。3电压矢量与定子磁链的关系4.2定子电压空间矢量对电动机转矩的影响电动机的电磁转矩可以表示为定子磁链与转子磁链的形式:sin2323rsrsmprsrsmpeLLLnLLLnTψψψψ(22)根据式(12)可以知道,电机转矩的大小不仅仅与定、转子磁链幅值有关,还与它们的夹角有关。在实际运行中,保持定子磁链幅值为额定值,以充分利用电动机铁心;转子磁链幅值由负载决定;要改变电动机转矩的大小,可以通过改变磁通角大小来实现。通过空间电压矢量u的工作状态和零状态来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变磁通角的大小,以达到控制电动机转矩的目的。这也就是直接转矩控制的目的5直接转矩控制系统的基本结构直接转矩控制系统的基本结构框图如图4所示,磁链观测开关状态选择电磁转矩模型K/Piα1iβ1uα1uβ1i1u1Ψα1ψβ1+++---TeWr*WrTe*DTDψ1SNψ1*ψ1UdcIMPG转矩观测速度调节器3φ/α-β扇区计算3φ/α-β磁链模型图4直接转矩控制系统基本结构框图3个被测信号为逆变器直流侧电压、定子电流和电机转速r,前2个信号由逆变器模型计算得到定子电压,通过电动机数学模型计算得到定子磁链、,进一步得到定子磁链所处的位置。转速信号r经速度PI调节器输出转矩给定信号*eT,转矩给定信号*eT和转矩实际eT值经转矩滞环比较器得到转矩开关信号TD,同时磁链给定信号和定子磁链s比较得到磁链开关信号D。电压状态选择单元综合转矩开关信号△eT、磁链开关信号△ψ和磁链所在的扇区SN得出逆变器的电压状态信号,从而控制逆变器输出相应的空间电压矢)(ns)1(nsssTnu)1(u量,控制异步电机的定子磁链的走走停停,进而控制异步电机的转矩。6系统仿真实验应用MATLAB/SIMULINK对系统进行仿真,电机类型选为鼠笼机,额定功率PN=12KW,额定频率fN=60Hz,ΨN=0.95Wb,Rs=0.16891Ω,Rr=0.13973Ω,Ls=0.02877H,Lm=0.02777H,Lr=0.0289H,np=2,J=0.1349kg.m2。三相逆变器开关器件采用IGBT,反并联反馈二极管,IGBT的缓冲电阻R=10KΩ,缓冲电容Cs=103μF。控制系统参数:Ψ*s=0.95Wb,速度给定为120rad/s,负载转矩给定Tm=30N.m,转矩限幅值为80N.m,PI调节器的比例系数Kp=50,积分系数Ki=130,直流侧电压Udc=600V。图5DTC系统仿真图仿真结果如下,图6为速度输出波形,图7为磁链波形,图8输出转矩,图9定子电流。图6速度输出波形图7磁链波形图8输出转矩图9定子电流7结论本文应用MATLAB软件对DTC系统进行建模,从仿真结果可以看出,DTC控制策略的正确性,仿真结果表明,系统具有很好的鲁棒性和快速性,这种控制技术可以实现异步电机产生转矩使感应电机获得与他励直流电机致的瞬态响应特性,实现对负载扰动和参考值变化的快速响应。本文建立的模型为进步研究变频调速系统提供了基础模型,其使用的灵活性,操作的简单性以及仿真的准确性为进行异步电机DTC控制系统的数字化打下良好的基础。参考文献[1]李夙.异步电动机直接转矩控制.北京∶机械工业出版社.1999:27~32[2]贺晓蓉等.感应电机SVPWM控制系统的仿真研究.微计算机信息,2007(1):96~99[3]张立,祝龙记.基于DSP控制的高压直流发生器研究.煤矿自动化,2008(4)[4]李维亚蓄电池电机车交流变频调速系统的研究.安徽理工大学硕士论文.2007作者简介作者(19**~)学历,研究方向:
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 ysr2008
ysr2008
本文标题:异步电动机直接转矩控制系统的仿真研究
链接地址:https://www.777doc.com/doc-6291345 .html