您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 复习试题(精密机械设计基础)
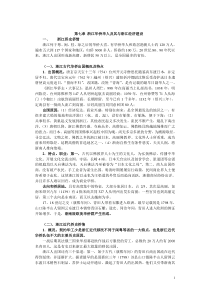
上海海事大学机械原理与设计教研室机构自由度上海海事大学机械原理与设计教研室CDABGFoEE’PL=9PH=1F=3n-2PL-PH=3×7-2×9-1=2n=7上海海事大学机械原理与设计教研室上海海事大学机械原理与设计教研室平面连杆机构上海海事大学机械原理与设计教研室(1)AD取何值时分别得到曲柄摇杆机构、双曲柄机构和双摇杆机构?(2)设AD=210mm。计算该机构的极位夹角θ、行程速比系数K和最小传动角γmin。已知一铰链四杆机构,AD为机架,AB和CD为连架杆、BC为连杆,其中三杆长度已知。试求:ABCD90200150上海海事大学机械原理与设计教研室(1)解:该机构为曲柄摇杆机构时,AB必为最短杆。分两种情况讨论。①AD不是最长杆时,应有:AB+BC≤CD+AD→AD≥AB+BC-CDAD≥90+200-150=140→140≤AD≤200②AD为最长杆时,应有:AB+AD≤BC+CD→AD≤BC+CD-ABAD≤200+150-90=260→200≤AD≤260∴140mm≤AD≤260mm时,为曲柄摇杆机构。ABCD90200150上海海事大学机械原理与设计教研室ABCD90200150该机构为双曲柄机构时,AD必为最短杆,而BC则为最长杆。此时应有:AD+BC≤AB+CD→AD≤AB+CD-BCAD≤90+150-200=40∴0AD≤40mm时,为双曲柄机构。该机构为双摇杆机构时,AD取上述区间以外的值。即:40mmAD140mm,或:260mmAD440mm(ADAB+BC+CD=90+200+150=440—装配条件。)上海海事大学机械原理与设计教研室(2)解:ABCD90200150210B2C2ADC1B1θ∠θ=∠C1AD-∠C2AD—①∠C1AD=arccos{[(BC-AB)2+AD2-CD2]/[2*(BC-AB)*AD]}—②∠C2AD=arccos{[(BC+AB)2+AD2-CD2]/[2*(BC+AB)*AD]}—③联立求解①、②、③式,得:∠θ=13.36660上海海事大学机械原理与设计教研室利用公式计算行程速比系数:K=(180+θ)/(180-θ)=(180+13.3666)/(180-13.3666)=1.1604C1B1abcdDAγ1C2B2γ2如前所述,最小传动角出现在曲柄与机架共线的两个位置之一。γ1=∠B1C1D=arccos{[b2+c2-(d-a)2]/2bc}=36.71040γ2=1800-∠B2C2D=1800-arccos{[b2+c2-(d+a)2]/2bc}=62.72040γmin=36.71040上海海事大学机械原理与设计教研室齿轮机构上海海事大学机械原理与设计教研室已知一对标准渐开线直齿圆柱齿轮的模数m=5mm,压力角α=200,标准中心距a=350mm,传动比i=9/5。试计算确定:①齿数z1、z2;②小齿轮的几何尺寸d1、da1、df1、db1、p、s、e。解①:由标准中心距公式:a=m(z1+z2)/2—(1)和传动比计算公式:i=z2/z1—(2)代入已知参数,联立求解得到:z1=50,z2=90上海海事大学机械原理与设计教研室解②:由标准齿轮尺寸计算公式可算出:d1=mz1=5*50=250mm;da1=d1+2ha=250+2*1.0*5=260mm;df1=d1-2hf=250-2*(1.0+0.25)*5=237.5mm;db1=d1cosα=250*cos200=234.9232mm;p=πm=3.1416*5=15.708mm;s=e=p/2=7.854mm上海海事大学机械原理与设计教研室复合轮系上海海事大学机械原理与设计教研室复合轮系一、传动比求解思路联立求解基本轮系1基本轮系2基本轮系3基本轮系K求解式1求解式2求解式3求解式K上海海事大学机械原理与设计教研室二、复合轮系拆解方法1.找出行星轮(有公转)2.找出中心轮(与行星轮啮合)3.找出行星架(支撑行星轮)基本周转轮系4.找出所有基本周转轮系后,余下为定轴轮系上海海事大学机械原理与设计教研室上海海事大学机械原理与设计教研室解:n3=n4(2分)i46=(n4/n6)=-(z6/z4)=-3(2分)nH=n6(2分)i13H=(n1-n6)/(n3-n6)=-(z3/z1)=-4(2分)i16=17(2分)上海海事大学机械原理与设计教研室传动受力分析上海海事大学机械原理与设计教研室图示为一斜齿圆柱齿轮—圆柱蜗杆传动。为使蜗杆轴上的轴向力最小,试确定:(1)斜齿轮1、2的螺旋线方向;(2)蜗轮4的转动方向;确定蜗杆轴转向→确定蜗杆轴向力Fa3的方向→确定齿轮2、1的轴向力Fa2、Fa1的方向→确定齿轮1、2的旋向→确定蜗轮4的转向。Fa3Fa2Fa1右旋左旋上海海事大学机械原理与设计教研室Fr2Fr1Fa1Ft2n1Ft1Fa2下图是齿轮蜗杆减速器,齿轮1为主动轮,其螺旋线方向为右旋,试回答下列问题:1)判断齿轮2的轮齿螺旋线方向,并在图中画出;2)在图中画出齿轮1和齿轮2在节点A处所受的轴向力方向;3)为使齿轮2和蜗杆3的轴向力抵消一部分,判断蜗杆3的旋向,并在图中画出?判断蜗轮4的旋向,并在图中画出。4)画出蜗杆3在节点B处所受三个分力方向,画出蜗轮4的转动方向。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 q7870924
q7870924
本文标题:复习试题(精密机械设计基础)
链接地址:https://www.777doc.com/doc-6523098 .html