您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 能源与动力工程 > 第2章(电力拖动控制系统)
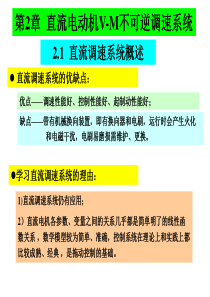
第2章直流电动机V-M不可逆调速系统2.1直流调速系统概述直流调速系统的优缺点:缺点——带有机械换向装置,即有换向器和电刷,运行时会产生火化和电磁干扰,电刷易磨损需维护、更换。1)直流调速系统仍有应用;2)直流电机各参数、变量之间的关系几乎都是简单明了的线性函数关系,数学模型较为简单、准确,控制系统在理论上和实践上都比较成熟、经典,是拖动控制的基础。优点——调速性能好、控制性能好、起制动性能好;学习直流调速系统的理由:2.1.1直流调速系统的类型1.直流调速系统的主导调速方法(1)改变电枢回路电阻——电枢回路串电阻调速;自控系统不用(2)调节电抠供电电压——变压调速;主导调速方法(3)减弱励磁磁通——------弱磁调速。辅助调速方法2.直流调速系统主电路——可调压的直流电源常用的有:(1)G-M系统(发电机-电动机系统)(2)V-M系统(可控整流器-电动机系统)(3)直流脉宽调制(PWM)系统(斩波器-电动机系统)ejaaK)RR(IUn3.直流调速系统的控制方式主电路构成不同,控制方法不同:移相控制、PWM控制等闭环控制方式开环控制闭环控制单闭环速度环双闭环速度环和电流环多环控制加位置环等电机调速系统中通常为:4.工作象限0Tn0Tn0Tn0Tn)a)b)c)da)单象限运行b)电压可反向的二象限运行c)电流可反向的二象限运行2.1.2G-M系统系统原理图控制原理、控制思路制动时的能量传递关系工作原理工作象限优点:特性好,平稳MG+(-)-(+)生产机械n励磁电源-放大装置+-fiGE+M3+-UgnaI12+1n2n4n3n5n6nLTTTL-0正向电动状态正向制动状态反向电动状态反向制动状态Tnn系统原理图50年代曾广泛地使用,目前仍有应用缺点:设备多、体积大、费用高、效率低机械特性2.1.3V-M系统系统构成控制思路制动时的能量传递关系控制原理工作象限优点:静止装置、经济、可靠0TnMdUV+-L~~GT+触发装置GT缺点:功率因数低、对电网谐波污染V1A1B1CdLM0dUV-M系统是70~90年代直流调速系统的主要形式2.1.4直流脉宽调制(PWM)系统驱动dU0iVDVTaE0u0UdU0uonTT0t)b)aa)原理电路图b)斩波器输出电压波形dtdonUUTTuU00原理电路图制动时的能量传递关系工作象限优缺点0Tn0Tn0Tn0Tn)a)b)c)da)单管电路b)双管电路c)双管电路d)H型桥式电路控制思路控制原理2.2V-M系统的机械特性2.2.1电流连续时的机械特性1.可控整流装置的输出电压cosUcosmsinUm)(UdommdomUmUd0m单相桥式20.9U2三相半波31.17U2三相桥式62.34U2不计换流时计及LC换流及内阻影响时aedoaacdodI)RR()(UIRIL)msinm()(U)(U002.电压平衡方程式dtdiLRiE)(Uadaado1VaI)(udo+-+-dUdLLReRaRaE0R等效电路22U22U26UV1A1B1CdLM0dU3.V-M系统电流连续时的机械特性机械特性方程式为:TCCRcosCUTCCRCUCRIUnTeedomTeedoeado理想空载转速n0,控制角增大时n0下降控制角变化时斜率不变,为:/eTRCC01n02n03n04n0234TaIaeICRn4320n00nnT∵是一组平行下移的直线记作:2.2.2电流断续时的机械特性以三相半波整流电路为例uaiAuBuCutt22UaE00)a)b1.理想空载转速eCaUancos17.1)(2060:输出电压的峰值相同,有同一个实际理想空载转速)cos(CUne32230022/enUC2.电流断续时机械特性曲线的斜率3.电流断续区域范围)0(/0nn/aaNII75060453000.20.30.40.510512015090NTT/01.211.4.电流断续时的机械特性曲线与电抗器电感量的大小有关工程上一般取时,随着电流减小,回路的等效电阻增大,斜率增大电流连续时电流断续时60:输出电压的峰值随α增大而下降,空载转速下降aNminaI).~.(I10050/22.3开环V-M调速系统及调速指标2.3.1开环V-M调速系统给定部件放大变换部件执行部件被控对象控制指令生成部件给定量触发装置可控整流主电路滤波(平波电抗器)负载(工作机械)直流电动机GTV*nULoad+E1dLdoUaIM-n~aE系统的最终控制对象是电动机转轴上的转速n。该电力拖动系统是一个开环控制的调速系统。1.系统原理图MdUV+-L~~GT+“”符号的含意同步移相触发电路GT*nU2.稳态结构图稳态结构图——表明自动控制系统在稳态运行时,其各个环节之间的输入量与输出量之间数学关系的结构框图RIa*nUn0dUaEsK1eC*ns*nmdommkdomdomdoUKUUU)UU(UcosUU)UU(cosUcosUUm*ndomdomdo12α在30°~120°的范围内对触发装置与可控整流桥整体来说,看成是一个线性放大环节,放大系数是。sKdomU0-1mnUU/*doUdomU656121011)求与的关系*nU0dU对同步移相信号为正弦波(正弦波幅值为Um)的触发电路对直流电动机,稳态时有doaaaeUEIRECn2)求与n的关系0dU稳态结构图对同步移相信号为锯齿波的触发电路(锯齿波起点幅值-Um,终点幅值Um,宽度为180°)*nSdoUKU2.3.2调速系统的稳态指标1.对调速系统的要求(1)调速(2)稳速(3)加、减速2.调速系统的稳态指标(1)调速范围DminNminmaxnnnnD(2)静差率S0nnSN额定转矩下提供的最高、最低转速当系统在某一给定转速下运行时,负载由空载增加到额定负载时所对应的转速降落与该给定转速下理想空载转速n0之比,称作静差率Smin0nTNnNTminnmaxn0Nnmaxnn0开环V-M系统的机械特性Nn机械特性曲线平行时,如果低速时的静差率能满足要求,则高速时的静差率自然就满足要求了。故静差率可表示成:NminNminNnnnnnS0静差率是用来衡量调速系统在负载变化时的转速稳定度的。机械特性越硬则静差率越小,转速稳定度就越高。3.调速范围与静差率的关系(1)NNSnDSn调速范围D、静差率S和转速降,三者之间的关系式为:显然,当系统的机械特性硬度一定,即一定时,若对静差率要求越高(S值越小),则允许的调速范围就越小。例如,某一开环V-M调速系统,额定转速nN=1000r/min,额定负载下的稳态速降△nN=50r/min,当要求静差率S=0.33时,允许的调速范围为:0.33100010(1)(10.33)50NNSnDSn如果要求S=0.1,则调速范围只有:0.110002.22(1)(10.1)50NNSnDSnNnNn4.开环V-M调速系统的主要问题无法克服的缺点——转速波动大、调速范围小。远远不能满足生产实际的要求。原因:当S与D都一定时,要满足要求的唯一途径是降低△nN,但对已制成的系统是无法减小的,对新设计的系统也很难达到能大幅度降低的要求。解决办法:闭环控制调速系统。2.4单闭环V-M调速系统及静特性2.4.1有静差转速单闭环V-M调速系统1.系统原理图*nU+aInnUVdoUctU-+TG给定比较速度调节器(放大)nU1R2R~直流电动机触发可控整流负载ASRGT测速与开环V-M系统比,增加了速度闭环控制环节:•测速装置、•速度比较、•速度调节器。测速装置:直流测速发电机TG,输出电压与转速n成正比,转速反馈值Un速度比较。(Un*的定标将取决于Un的定标)速度调节器ASR。调节器——对误差信号进行运算、调节(如比例P、积分I、微分D等)的单元2.稳态结构图RIa*nUnnUctUdoU+-+-aEsK1eCPK速度比较环节:速度调节器(放大环节):直流电动机转速:晶闸管触发装置与可控整流桥:测速发电机:n*nnUUUnPctUKUctSdoUKUeadoeaCRIUCEnnUn各环节的稳态关系如下:稳态结构图*nU+aInnUVdoUctU-+TGnU1R2R~ASRGT系统原理图2.4.2闭环V-M系统的静特性)K(CRI)K(CUKKneae*nSP11静特性方程:eSPC/KKKRIa*nUnnUctUdoU+-+-aEsK1eCPK——电动机的转速与电动机的电流(或转矩)之间的关系。1.静特性(可理解为闭环系统的机械特性)式中,2.开环系统与闭环系统的比较开环系统(OP):闭环系统(CL):;ICRn,nnnaeOPOPOP0aeCLCLCLIC)K(Rn,nnn10空载转速n0、负载Ia相同的情况下,有闭环系统加载后的转速降只是开环系统的1/(1+K)只要把KP取得足够大,使K很大,就可以使△nCL非常小,静差率S大大减小同一静差要求下大大提高了系统的调速范围DKnnCLOP1稳态结构图开环系统机械特性与闭环系统静特性的比较CLnOPn闭环静特性开环机械特性0aNIaI0nn闭环系统静特性和开环机械特性的关系闭环静特性开环机械特性0n04dU03dU02dU01dUABCD1aI2aI3aI4aIaI只有放大环节的转速闭环系统的稳态转速降只能减小而不能消除.为“有静差”调速系统。CLn2.开环系统与闭环系统的比较(续)闭环系统能减少稳态速降决不是闭环后电枢回路电阻能自动减小,而是在于它的自动调节作用。RIa*nUnnUctUdoU+-+-aEsK1eCPK稳态结构图3.扰动对系统的影响引起电机转速变化的因素:1)负载变化2)交流电源电压波动5)温升引起系统参数的变化3)电动机励磁的变化4)放大器放大系统的漂移在转速闭环系统中,负载扰动及前向通道的扰动最终都要影响转速变化而被测速装置检测出来,再通过反馈控制来减小它们对转速的影响。都能被有效地加以抑制。但是对于转速给定环节及转速检测环节本身的误差所引起的转速偏差,反馈调节则无能为力。自动调速系统的给定作用与扰动作用aI*nUaEnUctUdoU+-nU变化电源波动R励磁变化被测量给定nsK1eCPKPK从稳态精度来看,K值越大越好,然而,从后面对动态稳定性分析中可知,K值不能随意增大。名称比例(P)积分(I)比例积分(PI)积分比例(IP)2.5单闭环V-M调速系统的动态分析调速系统进行动态分析方法及步骤:1)推导出调速系统各环节的微分方程和传递函数2)建立系统的动态数学模型,得到系统的动态结构图3)进行稳定性分析4)动态性能的分析2.5.1闭环V-M调速系统各环节的动态数学模型1.几个常用环节的传递函数-+R2R1Vout-+CRVin电路图VinVoutttVinVoutttVinVoutttacbVinVouttt阶跃响应12RRKK)s(WPPRCTsT)s(Wii1sTK)s(WiP1sTK)s(WiP1传递函数Vout-+VinR1R2CVin-+VoutCR1R2比例积分(PI)VinVoutttacbVout-+VinR1R2C211,PiRKTRCR电路图2221111()1/1()()ZsRCsRWsZsRRRCs阶跃响应传递函数1()PiWsKTs垂直线段a——比例斜线段b——积分水平直线段c——饱和式中,2.晶闸管触发和整流装置的传递函数把触发电路GT和
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
![第7课大变革的时代[1]](/doc-679346.png)
 tiancaijing54
tiancaijing54
本文标题:第2章(电力拖动控制系统)
链接地址:https://www.777doc.com/doc-67622 .html