您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 机械原理课程设计自动盖章机设计
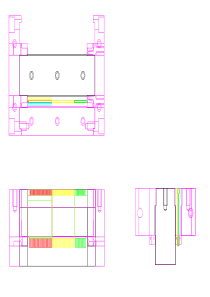
湖南工业大学课程设计资料袋机械工程学院学院(系、部)2015~2016学年第2学期课程名称机械原理课程设计指导教师职称教授学生姓名专业班级学号题目自动盖章机的设计成绩起止日期2016年6月20日~2016年6月24日目录清单序号材料名称资料数量备注1课程设计任务书12课程设计说明书13课程设计图纸张456机械原理设计说明书自动盖章机起止日期:2016年6月20日至2016年6月24日学生姓名班级学号成绩指导教师(签字)机械工程学院(部)2016年6月24日目录0.设计任务书·······································11.功能分解·········································22.机构的选用·······································23.机构的组合·······································34.方案详述·········································95.机构的设计······································106.传动方案设计····································147.参考资料········································158.总结············································151湖南工业大学课程设计任务书2015—2016学年第2学期机械工程学院(系、部)专业班级课程名称:机械原理课程设计设计题目:自动盖章机的设计完成期限:自2016年6月20日至2016年6月24日共1周内容及任务设计任务(1)可采用目前传统印章(不用印泥),适用于常用的几种办公印章结构形状;(2)实现在单页A3,B4,B5纸上盖章,纸的厚度为常见厚度,最大容许装纸量不少于100张;(3)纸面盖章位置可任意调节;(4)每分钟盖章次数不少于10页;(5)电源电压为220V;(6)对于工作中出现的非正常情况或危险情况具有保护措施;(7)适合于桌面工作,操作简单安全,盖章质量可靠,工作噪音低,结构轻巧,外形美观。设计提示(1)将纸盒中的一叠纸分成单页的方法很多,如靠机械推拉,离心力,摩擦力,静电等分离纸张。(2)在盖章的瞬间要求纸静止;因此,纸的输送机构应含有间歇运动机构。进度安排起止日期工作内容6.20-6.21构思该机械运动方案6.22-6.23运动分析及作图6.24整理说明书与答辩主要参考资料[1]朱理.机械原理[M].北京:高等教育出版社,2008:15-200[2]邹慧君.机械原理课程设计[M].北京:高等教育出版社,2009:15-250指导教师:2016年6月24日2一、功能分解为了实现在纸盒上自动打印记号的总功能,可将总功能分解为如下功能:①纸盒送到盖章的工位的功能;②纸盒在盖章工位定位功能;③盖章机的盖章功能;④盖章后的输出功能二、机构的选用根据前述设计要求,并且根据技术、经济及相容性要求,确定运动的执行元件——纸张输送机构,定位机构,盖章机构,输送机构,选用相应的机构来实现各项运动的功能,。自动盖章机的机构选型功能执行构件工艺动作执行机构输送纸张纸张输送机构水平往复运动凸轮机构连杆机构纸盒定位定位机构垂直间歇往复运动凸轮机构连杆机构盖章盖章机构铅直间歇往复运动凸轮机构连杆机构纸张输送输送机构垂直间歇往复运动凸轮机构连杆机构3三、机构的组合纸张输送机构备选方案一:机构特点:此方案采用凸轮机构+摇杆滑块机构,当凸轮的旋转时,推杆将绕支架摆动,从而带动滑块在来回运摆动。通过将凸轮的旋转运动转换成滑块的有急回运动的间歇往复运动来实现间歇送料的目的。优点:凸轮的使用容易实现预期的运动规律,滑块急回运动不明显,对纸盒的冲击小。缺点:凸轮的旋转运动导致摇杆的摆动角度较小,滑块行程较短,对纸盒的撞击速度不大,极易导致不能使纸盒送到预订的打印工位,工作效率低。备选方案二:4机构特点:此方案采用曲柄滑块机构,当曲柄等速转动时,从动件变速往复摆动,该机构可在曲柄长度一定的情况下,使执行构件滑块获得较大的行程。通过将轴的旋转运动转换成滑块的有急回特性的往复移动,可实现间歇送料的功能。优点:均为低副,其运动副元素为面接触,压力较小,承载能力较大,润滑好,磨损小,加工制造容易,且连杆机构中的低副一般是几何封闭,对保证工作的可靠有利。此机构中滑块在两个极限位置时其瞬时速度为零,避免了当把纸盒送到工位出产生机械上的冲击,从而避免了对纸盒的损害。此机构被设置成偏置的,能实现快进慢回或慢进快回的运动特性。此设计中我们选择快进慢回的运动特性。缺点:机构的类型数据需精确,不然会对纸盒产生冲击。定位机构:备选方案一:构特点:此方案通过上置的凸轮机构,推动滚子导杆,控制定位杆的伸出或缩进,从而控制物块运动或静止。5优点:凸轮机构可以实现各种复杂的运动要求,而且结构简单、紧凑。易于控制,导杆的长度可以自由设定,凸轮的行程不致太大,便于加工制造。还可以控制输出,作为输出机构。缺点:需要弹簧的拉伸才能保证推杆紧贴凸轮运动,有一定的能量损失。备选方案二:机构特点:此方案采用凸轮+连杆机构,通过将凸轮的旋转运动转换成定位杆的垂直方向的往复运动,从而实现对工件进行定位的目的。优点:机构简单,便于制造,节约成本。由于凸轮的近休和远休位置,可以在定位时停留一段时间,保证了打印的精度,避免了打印时物块移动导致的打印不清晰或打印不明显的现象。缺点:这样的凸轮制造难度较大,而且易磨损,容易损坏凸轮,需经常更换,也就增加了成本。凸轮的行程较大时,才能保证打印头远离工件一定的距离。盖章机构:备选方案一:6机构特点:此机构由推杆滚子凸轮、弹簧和连杆等构成。在此机构中,通过凸轮+连杆机构将转轴的旋转运动转换成连杆的往复摆动,从而实现打印功能。优点:机构传动路线较短,打印时可以产生一定的间歇,打印更清晰准确;通过主轴即可带动打印,改变凸轮廓线即可改变打印时间,易于控制;加工简单。缺点:打印时占用空间较大,也需弹簧拉伸作用使滚子推杆紧贴凸轮运动。凸轮的行程不大时,打印时距离工件较小,形成较大时,凸轮尺寸较大,占用空间较多。打印头下部需装有重物,使打印头垂直打印,否则打印时会出现摩擦痕迹。尺寸计算时有一定困难。备选方案二:7机构特点:此方案采用凸轮连杆机构,将凸轮的旋转运动转换成打印杆的垂直方向的往复运动,从而实现对机构进行打印的目的。优点:机构简单,便于制造,节约成本。由于凸轮的近休和远休位置,可以在打印时停留一段时间,保证了打印的清晰度,避免了打印时一闪而过的打印不清晰或打印不明显的现象。这样的凸轮制造难度过不大,且不易磨损,也就不需要高强度的合金,节约了成本。凸轮的行程不用很大,就能保证打印头远离工件一定的距离。缺点:需要弹簧的拉伸才能保证推杆紧贴凸轮运动,有一定的能量损失。输送机构:备选方案一:8机构特点:此方案的输出采用凸轮+连杆机构,通过将凸轮的旋转运动转换成连杆的旋转摆动,来实现输出的目的。优点:机构传动路线短,输出的速度相对较快。缺点:机构的杆件形状较为复杂,计算较为困难,易出现打印位置不水平,使打印出现偏差。杆件需要完全的刚性,连接时也需要较紧,不能有错位。杆件的分布设置难度较大,杆件的强度要求也较大。备选方案二:9机构特点:此方案通过上置的凸轮机构,推动滚子导杆,控制定位杆的伸出或缩进,从而控制物块运动或静止。优点:凸轮机构可以实现各种复杂的运动要求,而且结构简单、紧凑。易于控制,导杆的长度可以自由设定,凸轮的行程不致太大,便于加工制造。缺点:需要弹簧的拉伸才能保证推杆紧贴凸轮运动,有一定的能量损失。四、方案详述最终方案:10电动机选择原因:1)齿轮传动机构较为稳定,传动比稳定。2)盖章处印章升程较小,根据杠杆原理采用凸轮机构连接杆组较为合适。3)纸张输送处用偏置曲柄滑块机构有急回特性,曲柄的回转中心位于滑块导路上方,这样可以实现,快速送料,慢速返回的性能,且能保证送料行程的距离。当滑块把纸盒送到工位之前滑块的运动速度是逐渐减小的而且送到工位时的瞬时速度为零,从而减少了机械冲击对纸盒损害。4)用凸轮机构连接三角形推块,可同时实现输出物料和固定当前印盖物料,节省空间,简化机构.5)机构简单成本较低且易于装配。五、机构设计:纸张输送机构:曲柄滑块尺寸确定:在本机构中设置行程速比系数K=2,偏距e=50mm,滑块行程为120mnm。由公式11180KK可以求得,该曲柄滑块的极位夹角60,用作图法求出曲柄AB,连杆BC的长度,:11C1C260°120D步骤一:作出行程长21CC=120mm,作21CC的垂直平分线,以21CC的长为半径画圆,与垂直平分线交于点D,作21CCD的外接圆,则21CC在圆上的任意对应角为60C1C260°12050A60°DE12步骤二:,过1C点作与21CC距离为50mm的直线与圆交于点A,连接1AC、2AC,以A为圆心,1AC为半径交2AC于点E。C1C260°12050A60°42,99R42,99B2B1DE步骤三:作EC2的垂直平分线,量取1/2EC2的长度,以A为圆心画圆,交2AC于2B点,交1AC的延长线于1B点。C1C260°12050A60°42,99R42,99B2B193,9DE步骤四:量取22CB的长度即为连杆BC的长度,1AB的长度即为曲柄AB的长度。AB=43mm,BC=94mm。因送料机构为曲柄滑块机构,从动齿轮充当曲柄,所13以从动锥齿轮的直径不少于86mm,即从动锥齿轮的齿数不可少于2936,故所选的齿数合适。盖章机构:凸轮机构根据生产效率得出10次/min,主轴转速为1.05rad/s。打印凸轮的行程可任意设定,不可太大,否则将增加成本,本设计中取H=10mm,基圆半径为20mm,偏心距e=0,近休角为180度,推程角为60度,远休角为60度,回程角为60度。定位机构(输出机构):凸轮机构输出时,纸盒推至一半以上将发生倾斜,如图所示:假设定位时,定位档杆只挡到纸盒的一半位置,即20mm,则输出时,由于倾斜做用,挡板需要上升的距离为5120-250)(mm,故打印凸轮的行程需很大,凸轮的行程不少于51mm,本设计中取H=60mm。因基圆半径增大,可见小压力角,从而改善机构的传动机构的传力特性,但系事机构的尺寸也会增大,故取此凸轮的基圆半径为60mm,偏心距e=0,近休角为60度,推程角为30度,远休角为210度,回程角为60度。14六:传动方案设计:减速3减速4纸张输送的往复移动电动机运动分支印章间歇往复移动减速1减速2运动分支定位机间歇往复移动输出机间歇往复移动传动装置参数:所选取的齿轮传动的齿轮均为渐开线标准齿轮,其模数m=3,压力角20,齿顶高系数0.1*ah,标准直齿圆柱齿轮的顶隙系数25.0*c,锥齿轮的顶隙系数2.0*c。减速1为皮带轮传动,主动轮直径为130mm,从动齿轮的直径为390mm,传动比为3。减速2为标准直齿圆柱齿轮啮合,主动轮齿数为18,从动齿轮的齿数为72,传动比为4。减速3为标准直齿圆柱齿轮啮合,主动轮齿数为18,从动齿轮的齿数为72,传动比为4。减速4为标准直齿圆柱齿轮啮合,主动轮齿数为18,从动齿轮的齿数为54,传动比为3。送料机构采用锥齿轮,啮合齿数均为36齿。运动循环图及运动分析:1.运动循环表15输送送料退回定位向下停停向上盖章停向下停向上停输出推出停停推出2.运动循环图七、参考资料1.《机械原理》(第二版)朱理编高等教育出版社2.《机械设计课程设计》朱文坚黄平编华南理工大学出版社3.《机械设计基础课程设计》孙德志张伟华邓子龙编科学出版社4.《机械设计与理论》李柱国主编科学出版社5.《机械原理设计课程设计指导书》裘建新主编高等教育出版社八、总结这次课程设计,是将自己大一大二学到的知识综合起来,根据实际要求来设输送定位盖章输出16计
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 guoyi00123
guoyi00123
本文标题:机械原理课程设计自动盖章机设计
链接地址:https://www.777doc.com/doc-7082421 .html