您好,欢迎访问三七文档
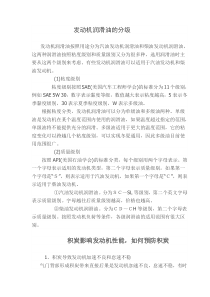
五自由度自由曲面加工系统及其CAM设计研究横式结构数控电火花线切割机床,用于自由曲面型面的超精密制造。基于机器人运动学理论建立五自由度机床坐标系统并推导出数学模型。实施加工过程中运动轴位移量补偿计算,开发了精密加工系统的计算机辅助制造功能。解决了从坐标点到各轴位移量的转换计算问题。引言在制造行业,自由曲面元件精密超精密加工技术具有特殊的地位和重要的意义,是决定产品性能的关键因素之一。电火花线切割加工作为一种精密超精密特种加工技术,其工艺手段具有如下不可替代的特点:①可以加工任何硬度的导电金属材料;②加工过程中不会受到宏观力的作用和影响;③加工精度和表面质量很高。尽管目前广泛使用的传统四轴联动电火花线切割机床可以进行常规锥度曲面加工,甚至有的也可以加工上下异形的锥度曲面,但对螺旋面、球面等异形曲面其却无能为力[1]。为拓宽电火花线切割机床的加工范围,笔者所属实验室自主研发了一种新型的可用于自由曲面精密超精密加工的五轴联动电火花线切割机床。本文针对曲面加工CAM系统的建立及其关键问题的解决方案进行阐述。1新型横式结构数控电火花线切割机床图1所示为传统五轴四轴联动电火花线切割机床驱动系统简图。图1传统WEDM机床驱动系统简图此类机床,除了工作台有X、Y两个数控轴以外,在上丝架上还有一个工作台,安装U、V两个数控轴。U、V轴的运动使电极丝的上端可以倾斜,从而切割出有锥角的表面。在进行普通的切割时,此种结构的机床可以实现很高的加工精度,但是在进行曲面加工时,其却存在诸如加工难度大、精度低且可加工的曲面范围十分有限的问题。为解决上述问题,笔者所属实验室开发了如下图2所示的新型横式五轴电火花线切割加工机床。图2横式WEDM机床系统结构简图此机床采用水平走丝系统,机械驱动系统也不同于传统的四轴联动机床。没有采用U、V轴运动方案,而是设计了摆动轴B和旋转轴C,被加工工件安装在C轴,利用工件的转动、摆动和移动的复合运动方式,结合所开发的数控系统,就可以进行锥面、球面等多种曲面加工,在很大程度了扩宽了WEDM机床的加工范围。2机床CAM系统图3为本研究建立的上述机床的CAM系统框图。系统工作流程为:首先在Pro/E中创建待加工工件模型,利用其自带工具Pro/toolkit进行二次开发,创建程序获取工件的表面形状数据,此数据为三维(X,Y,Z)空间点坐标的形式。进行必要的表面干涉检查等处理后,输入到CAM系统。然后采用机器人运动学理沦,创建机床坐标系统并推导公式,求取两点之问的五轴位移量,将最终结果输送到运动控制系统控制待加工工件与电机丝之间的相对位置,从而切割出所需的曲面。由上述的工作流程可见,与两轴、三轴联动机床CAM系统相比,五轴联动机床CAM系统多了一个从空间点到五轴位移量的转换环节,这一环节为建立五轴联动机床CAM系统的关键所在[2,3]。图3CAM系统框图3五轴联动机床坐标系统数学模型推导3.1五轴联动机床数学模型的推导从运动几何学的角度来看,可以将机床看作是关节型机器人,对机床坐标系求解,归根结底属于机器人运动学求反解的问题。也就是在电极丝和加工工件的相对位置关系已知时,求解机床各个轴关节的位移量(包括平动位移和角位移)。根据关节型机器人运动学理沦,在机床每一个关节上建立运动坐标系,随同关节运动,这些运动坐标系是相对坐标系。关节的轴线通常也作为运动坐标系的一个轴,坐标原点一般选在关节轴线上的一个便于识别的特征点上,以方便计算[4|。对图2所示机床建立坐标系统如图4所示。O0是机床的零点坐标系,是固定坐标系。为了以后计算方便,图中在电极丝上建立了电极丝坐标系Oω并且使其坐标轴方向跟05坐标轴初始方向一致,Oω坐标系相对机床来说也是固定不变的,假设Oω坐标系原点在机床零点坐标系O0中的坐标是{△x,△y,△z}。图4机床坐标系统图从图4可以看出,系统一共有7个变量,由于d4和d5是机床常数,所以需要求解的共有五个位移变量:dl、d2、d3、θ4和θ5,分别是X轴位移、Y轴位移、Z轴位移、B轴摆动角度和C轴转动角度。d1、d2和d3是移动变量,θ4和θ5是转动变量[5]。根据图4首先按照齐次坐标变换方法建立机床各个轴的连杆参数变换矩阵,符号表示Oω坐标系在O0坐标系中的描述,其余类推。将式1~8代入下列闭环关系式其中,θ4是摆动角度,根据机床实际结构,其取值范围是在(-90°~90°)。当az=0时,θ4处于极限位置一90°(nz0)或90°(nz0)。θ5是转动角度,存在关系θy=cosθ5和θx=sinθ5。所以,当θy>0时,θ5处于第一、四象限;当θy0时,θ5处于第二、三象限;当θy=0时,θ5等于90°的整数倍。在上式的推导中,是假设电极丝和加工工件的相对位置为已知量。所以,要想得到最终关系式,必须首先知道。下面以球面为例,说明的求解方法。3.2球面加工的求解图5所示为在Pro/E中建立的球面模型,球心点为O,P是球面上的一个加工点。图5球面CAD模型为了简化计算,球心坐标系O的各个轴的方向可以参照坐标系结构图(图4)上的O5坐标系建立。假设O5与O重合,加工P点时,在P点建立坐标系的准则是:X轴方向为电极丝所处方向,Y轴方向为电极丝的移动方向,若不考虑电极丝半径和放电间隙,那么XY轴所确定的平面就是球面在P点的切平面,所以Z轴指向球心O。机床在加工P点时,电极丝上的坐标系Oω应该与加工点坐标系P重合。设球的半径为R,P点在球面的CAD模型中的坐,y,z),容易计算出将上式代入(式10)就可以计算出机床各个轴在加工球面时的位移量。上面以球面为例介绍了g5的求解方法,至于其它类型曲面,建立坐标系后可采用相同的方法进行求解。利用此数学模型可将在Pro/E中提取的三维表面形状数据点转换为加工过程中五轴位移量,解决了建立五轴联动机床CAM系统的关键问题。4结论使用线切割加工技术进行曲面加工具有重要的意义和广泛的应用前景,但是传统WEDM机床在这方面具有各种各样的局限性,限制了其加工范围和加工的精度。本研究以新型五轴联动机床为平台,进行机床曲面加工CAM系统的设计,创造性地将机器人理论引入了电火花线切割领域,利用机器人运动学理论,建立机床数学模型,提出了一种新型算法,解决了从坐标点到各轴位移量的转换计算问题,并在此基础上构建了机床的CAM系统,从而大大扩展了线切割机床的加工范围。新型结构的引人,可以大大提高机床的加工精度,使线切割机床可以应用于精密的曲面加工。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 阿修罗人兽合一迷失
阿修罗人兽合一迷失
本文标题:五轴水切割
链接地址:https://www.777doc.com/doc-7264585 .html