您好,欢迎访问三七文档
当前位置:首页 > 临时分类 > ABB机器人零点校准方法
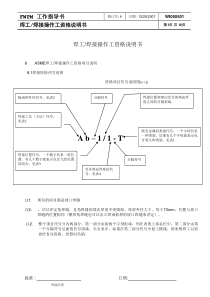
1FlexPendant的操作方式1、操作FlexPendant时,通常左手持设备,右手在触摸屏上操作。具体手持方法如图12所示图122、手持操作器主要部件如图13所示图133、控制柜上的主要按钮和端口如图14所示图144、控制柜上钥匙开关的位置于意义如图15所示图15注:手动全速模式不建议使用校准机器人零点位置的具体方法注:需要点击操作的地方都做了浅红色标记第一步:选择手动操纵(参看图1,首先把钥匙开关打到手动位置)方法:1点击ABB2点击手动操纵2图1第二步:选择动作模式(参看图2和图3)方法:1点击动作模式2点击轴1-3或者轴4-63点击确定第三步:选择工具坐标(参看图2和图4)方法:1点击工具坐标2点击tGripper3点击确定图2图3第四步:选择移动速度(参看图2和图5)方法:1点击增量2点击中或者小3点击确定图4图5第五步:手动移动机器人各轴到机械零点位置(参看图2)方法:此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系3注意:如果先前选择轴1-3则1操纵杆上下移动为2轴动作2操纵杆左右移动为1轴动作3操纵杆顺/逆时针旋转为3轴动作如果先前选择轴4-6则1操纵杆上下移动为5轴动作2操纵杆左右移动为4轴动作3操纵杆顺/逆时针旋转为6轴动作1左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面)2右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点图6A(六轴机器人)图6B(四轴机器人)移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。第六步:更新转数计数器(参看图1,此时可以示教器使能开关)方法:1点击ABB2点击校准3点击ROB_1(参看图7)图7图844点击转数计数器(参看图8)5点击更新转数计数器…(会弹出一个警告界面)6点击是7点选显示转数计数器未更新所有轴,显示转数计数器已更新的轴不用选择(参看图9)8点击更新(会弹出一个警告界面如图10)图99点击更新(会弹出一个进度窗口然后等待)图10最后显示更新以后的状态如图11所示10点击关闭(更新完毕)图11第七步:重新启动机器人方法:1点击ABB2点击重新启动3点击热启5
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 jasonwinter
jasonwinter
本文标题:ABB机器人零点校准方法
链接地址:https://www.777doc.com/doc-8563131 .html