您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 第二章-机电一体化系统中常用的传动机构
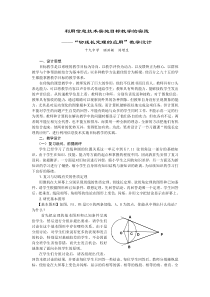
1第二章:机电一体化系统中常用的传动机构一、教学建议通过文字教材了解机电一体化系统中常用的传动机构。录像教材第2讲以实物、照片、场景等视频方式作为辅助教学手段讲解了机电一体化系统中常用的精密传动机构及其调整方式。流媒体课件的第3讲和第4讲讲解了机电一体化系统中常用的传动机构,包括丝杆与齿轮等精密传动机构及其调整方式。在学习的过程中,如果有学习的心得和体会,请在课程论坛上和大家分享;如果有什么疑惑,也可以再课程论坛寻找帮助。二、教学要求:了解机电一体化系统中常用传动机构的基本原理与选择方法要求了解机电一体化系统中常用的机械传动机构有螺旋传动、齿轮传动等。功能如表1所示。表1传动机构及其功能基本功能传动机构运动的变换动力的变换形式行程方向速度大小形式丝杠螺母√√√齿轮√√√齿轮齿条√√1.机械传动系统的特性(1)转动惯量机械传动系统的转动惯量大会产生以下不利影响:使机械负载增加,功率消耗大;系统响应速度变慢,灵敏度降低;系统的固有频率下降,容易产生谐振;电气驱动部件的谐振频率降低、阻尼增大等。因此,在不影响系统刚度的条件下,机械部分的质量和转动惯量应尽可能小。例1:导程L0=8mm的丝杠驱动总质量为60kg的工作台与工件,则其折算到丝杠上的等效转动惯量为()kg·mm2。A.48.5B.97C.4.85D.9.7说明:工作台折算到丝杠的等效转动惯量:5220103.9728602LmGJkg·m3。故括号内应填入“B”。2(2)阻尼例2:进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响,因此机械系统的阻尼比ξ取值越小越好。()说明:阻尼比02mKB除了与机械系统的粘性阻尼系数B有关外,还与系统刚度K0和质量m有关。因此,在机械结构设计时,应当通过对刚度、质量和摩擦系数等参数的合理匹配,得到机械系统阻尼比ξ的适当取值,以保证系统的良好动态特性。根据经验,将阻尼比取为0.4≤ξ≤0.7。故结论是错误的,括号内应填入“×”号。(3)机械系统的刚度对系统动态特性的主要影响①失动量。系统刚度越大,因静摩擦力的作用所产生的传动部件的弹性变形越小,系统的失动量也越小。②固有频率。机械系统刚度越大,固有频率越高,可远离控制系统或驱动系统的频带宽度,从而避免产生共振。③稳定性。刚度对开环伺服系统的稳定性没有影啊,而对闭环系统的稳定性有很大影响,提高刚度可增加闭环系统的稳定性。(4)传动精度机械传动系统中,影响系统传动精度的误差可分为传动误差和回程误差两种。减小传动误差、提高传动精度的结构措施有:适当提高零部件本身的精度;合理设计传动链,减少零部件制造、装配误差对传动精度的影响;采用消隙机构,以减少或消除回程误差。2.滚珠丝杠副间隙的调整和预紧滚珠丝杠副消除轴向间隙的调整预紧方法有:螺纹预紧调整式、双螺母差齿预紧调整式、双螺母垫片预紧调整式、弹簧式自动调整预紧式、单螺母变位导程自预紧式。例3:分析下图调整齿侧间隙的原理。1.锁紧螺母2.圆螺母3.带凸缘螺母4.无凸缘螺母答:图中所示的双螺母螺纹预紧调整齿侧间隙,双螺母中的一个外端有凸缘,一个外端无凸缘,但制有螺纹,它伸出套筒外用两个螺母固定锁紧,并用键来防止两螺母相对转动。旋转圆螺母可调整消除间隙并产生预紧力,之后再用锁紧螺母锁紧。3.齿轮传动比的最佳选择及其分配(1)重量最小原则(结构紧凑)3对于小功率传动系统,使各级传动比niiii321,即可使传动装置的重量最轻。(2)转动惯量最小原则(快速响应)对于n级齿轮传动系作同类分析可得:121)12(21212nnniin,1221222nkniik,其中, n k432。(3)输出轴转角误差最小原则(精度)为了提高机电一体化系统中齿轮传动系统传递运动的精度,各级传动比应按“先小后大”原则分配,以便降低齿轮的加工误差、安装误差以及回转误差对输出转角精度的影响。要求体积小、重量轻的齿轮:采用重量最轻的原则;要求运动平稳、起停频繁和动态性能好的轮系:采用最小转动惯量原则、输出轴转角误差最小原则;提高传动精度和减小回程误差为主的轮系:转角误差最小原则。4.齿轮传动的齿侧间隙的调整圆柱齿轮传动:偏心套调整法、轴向垫片调整法、双片薄齿轮错齿调整法(轴向拉簧式、可调拉簧式);斜齿轮传动:垫片错齿调整。齿轮齿条传动机构:当传动负载小时,可采用双片薄齿轮错齿调整法;当传动负载大时,可采用双齿轮调整法。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 mayaer
mayaer
本文标题:第二章-机电一体化系统中常用的传动机构
链接地址:https://www.777doc.com/doc-2185803 .html