您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 能源与动力工程 > 基于数学形态学的车牌定位
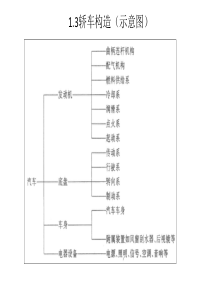
基于数学形态学的车牌定位摘要车牌定位是智能交通系统中最先遇到的重要环节,因此如何实现车牌的快速、准确定位具有现实应用意义。本文先对车牌图像特征作了简要介绍,随后对基于数学形态学的车牌定位进行了研究与分析,最后在车牌图像二值化时,应用最大类间方差求得最佳阈值,从而实现车牌的快速、准确定位。内容列表1.引言2.车牌图像特征3.数学形态学4.最大类间方差法5.实现方法与结果6.结束语7.参考文献引言常用的车牌定位算法有基于彩色或者灰度处理的方法、行检测和边缘统计法、Gabor滤波法、基于小波变换的方法等,但这些算法在实现简单、快速准确定位方面都不尽如人意,本文针对基于数学形态学的车牌定位进行了研究,由于数学形态学的数学基础和所用语言是集合论,因此它具有完备的数学基础,这为形态学用于图像分析和处理、形态滤波器的特性分析和系统设计奠定了坚实的基础。数学形态学的算法具有天然的并行实现的结构,实现了形态学分析和处理算法的并行,大大提高了图像分析和处理的速度,从而实现车牌的快速准确定位。车牌图像特征目前实施的车牌标准是中华人民共和国机动车号牌GA-362007,车牌的特征可以概括为以下几个方面:1)外廓尺寸。大部分车辆的车牌尺寸是400mm×140mm、440mm×220mm,低速车牌尺寸较为特别,为300mm×160mm2)颜色。大型汽车、教练汽车、普通摩托车、教练摩托车、低速车辆的车牌颜色是黄底黑字;小型汽车、轻便摩托车的车牌颜色是蓝底白字。3)纹理。车牌上有规律地排列着7个字符,车牌图像颜色呈现出一系列的颜色交替。数学形态学数学形态学(MathematicalMorphology)诞生于1964年,是由法国巴黎矿业学院博士生赛拉(J.Serra)和导师马瑟荣提出的,基本思想是用具有一定形态的结构元素去量度和提取图像中的对应形状以达到对图像分析和识别的目的。数学形态学是由一组形态学的代数运算子组成的,它的基本运算有4个:膨胀(或扩张)、腐蚀(或侵蚀)、开启和闭合,它们在二值图像和灰度图像中各有特点。膨胀与腐蚀。尽管图像增强处理使灰度图像中的噪声得到抑制,但噪声的完全去除常常是很困难的,而且在由灰度图像变换成二值图像的处理过程中,难免又增加一些噪声,它们对形状特征的提取是极为不利的,为此,必须对二值图像进行平滑处理。二值图像的噪声表现形式有很多种,其中点状图与小孔是最为常见的。所谓点状图是指面积相对较小的1像素与0像素连接成分。膨胀与腐蚀处理能够有效地解决这些小的连接成分,使图像得到平滑。对于任意图像子集,膨胀是不断地把非S的边界点加入到S中,而腐蚀是不断地将S的边界点消除。开启与闭合。开启运算是对图像先腐蚀再膨胀;闭合运算是对图像膨胀再腐蚀。MATLAB中对应的处理函数分别为:imdilate(膨胀)、imerode(腐蚀)、imopen(开启)、imclose(闭合)。最大类间方差法在数学图像处理的过程中,为了便于图像的分析与识别,往往需要将图像转化为二值图像,即图像的二值化。作为一种区域分割技术,图像的二值化将图像分为前景与背景,适应于前景与背景对比较为强烈的图像。二值化效果的好坏直接取决于阈值的选择。为了在各种图像中都取得较好的二值化效果,阀值选取应具有自适应性,对图像的先验知识不应过度依赖,尽量使用有关灰度值的相对特性,能根据图像灰度分布来自动选取合适的阈值。在车牌定位中,数学形态学图像处理用到了二值图像。因此,图像二值化直接影响车牌识别的准确性。本文采用由日本学者大津于1979年提出的最大类间方差法(STSU),是一种自适应的阈值确定方法,它是根据图像的灰度特性,将图像分成前景与背景两部分。前景与背景间的方差越大,说明这两部分的差别越大,这就意味着分割图像时出错的概率越小。对于灰度图像I(x,y),设其灰度级为L,前景与背景的分割阈值记作T,于是图像中的像素值被分为两个区域,灰度值分别为0,1,2,…,T、T+1,T+2,…,L.属于前景的像素点占整幅图像的比率为Pf,其平均灰度为Ef,属于背景的像素点占整幅图像的比率为Pb,其平均灰度为Eb,整幅图像的总平均灰度记为E,类间方差记为G。图像的大小记为M×N,图像中大于阈值T的像素个数记为N0,小于阈值T的像素个数记为N1,于是有:Pf=N0/M×NPb=N1/M×NN0+N1=M×NE=Pf×Ef+Pb×EbG=Pf(E-Ef)2+Pb(E-Eb)2采用遍历的方法,得到的阈值T即为最佳阈值。实现方法与结果下图1给出了车牌定位的处理流程。图1车牌定位处理流程车牌图像的二值化为便于图像的分析与识别,需要将图像转化为灰度图像,然后根据由最大类间方差法计算出的阀值再将灰度图像转化为二值图像。图2图像的二值化车牌图像的形态学处理一般情况下,将图像二值化后,图像上会有一些相对较小的连通组件,不利于车牌的定位,此时需要对此进行处理以减少连通体个数。利用函数bwareaopen(BW,P)形态学打开二值图像,并移除较小的连通组件。图3图像经bwareaopen处理前后从图3中的两幅图可以清晰地看到,大概在车灯位置处的一些较小的连通组件不见了,图像变得更为平滑。接着用函数imclose(IM,SE)对图像进行闭合操作,其中SE为结构元素。图4图像的闭合操作闭合操作是先膨胀再腐蚀,在车牌位置,白色区域先膨胀,再腐蚀去字符,于是车牌所在位置变为白色连通域。然后用函数[B,L]=bwboundaries(BW)寻找二值图像边界,其中B为连通组件的边界,L为标记矩阵。并用RGB=label2rgb(L,map)将标记矩阵L转化为RGB图像,如图5所示。图5标记矩阵L对应的RGB图像各个连通组件的轮廓如图6所示。从坐标上可以看出其大致的位置与形状。图6连通组件的轮廓最后计算各个连通组件的面积与周长,而车牌周长perimeter与面积area的关系是一定的,设relation=area/perimeter,以relation作为匹配度,各个连通组件面积周长比最接近relation的一个便是车牌所在的位置,如图6所示,图中“o”代表车牌的质心。图7各个连通组件的匹配度最后应用再应用X2=imcrop(X,map,rect)将车牌取出。如图8所示。图8车牌图像结束语从实现结果上分析,车牌经过数学形态学分析处理后,可以得到为数不多的几个连通组件,然后分析这几个连通组件,便可确定车牌位置。本文中还应用了最大类间方差法求阈值,这样可以使得图像的二值化效果达到最佳,为以后的二值图像的分析奠定基础。参考文献1.霍宏涛.数字图像处理.北京:机械工业出版社,20032.陈杰.MATLAB宝典.北京:电子工业出版社,20073.张宇、黄险峰.基于数字形态法和主成分分析法的车牌定位.计算机与数字工程,20094.郭鑫泉、伍宏涛、吴青.利用数学形态学实现车牌的快速定位.2008世界通信大会中国论坛,20085.李波、曾致远、付祥胜.基于数学形态学和边缘特征的车牌定位算法.视频技术应用与工程,20056.韩珊珊等.基于MALAB的车牌定位算法研究.科技资讯,20097.GA36-2007中华人民共和国机动车号牌
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
![二交通和通信工具的进步[人民版]]](/doc-313040.png)
 wendy223
wendy223
本文标题:基于数学形态学的车牌定位
链接地址:https://www.777doc.com/doc-2575262 .html