您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 制造加工工艺 > SINUMERIK 840D_810D驱动优化基础与分析
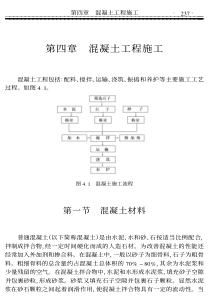
SIEMENSSEPTCHENXIANFENG2008-10-21840D/810D驱动优化基础与分析1概述一台数控机床的结构通常采用铸铁的床身,运动部件如工作台(或称为溜板)由导轨通过带滚动体的支承部件支撑。伺服电机通过连轴器与滚珠丝杠连接,伺服电机旋转动作通过滚珠丝杠和丝杠螺母转换为直线运动,推动工作台按照数控指令运动,如图1所示为数控机床的传动系统结构。图1数控机床传动系统结构图在理想状态下,即所有的机械部件都是刚性的,而且无传动误差,伺服电机的推力可以直接作用到工作台上,工作台带动工件与高速旋转的主轴产生切削运动。但是实际的情况是,传动系统存在各种误差,如丝杠的反向间隙、导轨支承与导轨之间的间隙,滚珠丝杠的弹性变形,机床工作台的弹性变形。当伺服电机产生的转矩作用在丝杠上时,伺服电机的位置和速度的变化与工件的实际速度和位置的变化不是线性关系。特别是当伺服电机以各种不同的速度运行时,加速度的频率发生变化,由于机械系统的弹性存在使得实际的运动发生了变化,这种变化称为动态响应。其实从机械设计的角度分析,由于材料、制造和装配等原因,每台机床的固有频率,或称为最低自然频率是不同的。2驱动优化理论基础2.1理论模型与响应机床及其相关的属性中最低自然频率是一个重要参数,也是描述机床动态响应的依据。机械的特性可以通过一个数学模型进行模拟。图2表示的是一个简化的模型。在模型的左边是伺服电机,右边是负载,伺服电机与负载之间由弹簧连接。图2通过弹性耦合的传动模型这是一个现实生活中的实例来描述弹性物体的运动。手持一个通过弹簧连接的负载,当手缓慢上下运动时,负载可以准确地跟随手的运动而运动。当手的上下运动速度加快后,负载进入共振条件,随着手上下运动频率的增加,负载不再跟随手的激励运动而运动,而且其运动状态与手的能量大小无关,如图3所示。1SIEMENSSEPTCHENXIANFENG2008-10-21图3给定与负载之间的位置变化在数控机床中传动系统不是刚性的。金属床身在外力作用下的弹性变形、丝杠的扭曲变形、丝杠的反向间隙等因素使得传动系统成为其动力源――伺服电机的弹性负载。通过上述模型,可以看到一台机床同样具有弹性,其频率响应特性影响机床传动系统的动态特性,如图4、5所示。图4机械结构到简化框图2SIEMENSSEPTCHENXIANFENG2008-10-21图5机械模型的特性结构图图6负载响应的Bode图3SIEMENSSEPTCHENXIANFENG2008-10-21在图6中可以看出,当激励大约为20Hz时负载出现了共振,可以看出激励的振幅越低,负载响应的振幅越大,如图7、8、9所示。图7频域响应与时域响应的关系(20Hz)图8频域响应与时域响应的关系(6Hz)4SIEMENSSEPTCHENXIANFENG2008-10-21图9频域响应与时域响应的关系(36Hz)当激励频率增加到35Hz,负载难以响应高的激励的幅值变化,增加激励的能量也无助于改善负载的响应,而且能量将使得负载发生弹性变形,在这种条件下长时间运行还会损坏机床。2.2阻尼、频率响应与阶跃响应对于一个振荡过程起决定性作用的一个变量是其频率f。特征角频率:T10=ω。谐振角频率,在这个角频率时,频率响应特性达到最大值,2021Dr−=ωω。阻尼因数越小,谐振角频率就越接近特征角频率。固有角频率则是对时间域中瞬态响应特性的一个判断依据,201Dd−=ωω。当阻尼因数越来越小时,特征角频率、谐振角频率和固有角频率这三个值会越来越接近,而在实际中,阻尼因数都非常小,因此在机械传递环节中常常采用“固有频率”作为特性量。起振瞬态过程中超调量的高度取决于阻尼因数。图10所示为阻尼、频率响应与阶跃响应的关系。5SIEMENSSEPTCHENXIANFENG2008-10-216SIEMENSSEPTCHENXIANFENG2008-10-21图10阻尼、频率响应与阶跃响应的关系7SIEMENSSEPTCHENXIANFENG2008-10-212.3带有耦合联接负载的电动机(双质量振动器)在进给传动系统中的机械环节,可以描述为通过具有有限刚性的弹性联接件串联起来的质量。同时有一个阻尼起作用。在一个完整的进给传动系统中,有很多振动器是串联起来的,比如用联轴器把电动机和负载连接起来。根据弹簧系数以及电机和负载的质量可以得出特征角频率(共振角频率);零点特征角频率。由Bode图11可以看出:在幅值响应特性方面,幅值在极点位置增大,在零点位置减小;在相位响应特性方面,在极点处出现反相移,在零点处出现正相移。如果电动机由于转矩冲击的而形成自由振荡,就会产生固有频率的振荡。由于阻尼很小,所以固有频率也约等于共振角频率。Tf图11带有耦合联接负载的电动机频率响应Bode图2.4频率响应的测量点数控系统在接收到运行命令后,将计算的位置指令发送给驱动系统,驱动系统控制伺服电机运动,通过丝杠推动工作台直线运动,如图12所示,机床传动系统的实际位置在加速或减速过程中与指令位置出现了偏差。这种偏差取决于负载的质量、传动系统的惯量以及机械的刚性。所谓驱动特性的优化是指驱动器的参数与机械系统之间的匹配,使驱动系统达到尽可能高的动态响应,以确保数控系统插补执行的速度,提高切削的精度和降低表面粗造度。图13描述的是一个驱动器的控制结构,驱8SIEMENSSEPTCHENXIANFENG2008-10-21动系统由电流环、速度环和位置环构成。数控系统发出速度指令给驱动器,驱动器根据给定值和实际值进行调节,并将控制指令以电流给定的形式送到电流控制器上。电流控制器根据电流给定和实际电流对电流环进行闭环控制,再通过大功率器件实现对伺服电机的控制。图12数控机床的指令位置和实际位置图13一个驱动器的控制结构如果将一个特定的噪声施加到驱动器的输入端,由于机床传动系统的负载质量、惯量以及刚性的不同,传动系统对于噪声的响应也是不同的。图14是一个噪声给定信号的示意图,通过分析传动系统对噪声给定信号的响应,就可以得到相应机械系统的特性,并且依据测试的结果对驱动系统的参数进行匹配。9SIEMENSSEPTCHENXIANFENG2008-10-21图14噪声给定信号的示意图传动系统的实际响应(实际速度)与驱动器噪声输入(实际电流)之间的关系就是驱动系统的传递函数,通过驱动器的实际响应(实际速度)与驱动器的噪声输入(实际电流)之间的比值,可以导出驱动器噪声响应的波特图,如图15所示。图15驱动器噪声响应的波特图10SIEMENSSEPTCHENXIANFENG2008-10-21机械环节的频率响应如图16所示。速度环的优化,就是通过调整速度环的Kp,Tn值,使驱动器的参数与机械系统之间匹配,如图17所示。图16机械环节的频率响应Bode图11SIEMENSSEPTCHENXIANFENG2008-10-21图17调整Kp,Tn优化速度环控制器12SIEMENSSEPTCHENXIANFENG2008-10-21由于不断提高Kp值,电机/负载传动环节出现振荡,此时可以通过设置带阻滤波器来衰减速度调节器的共振频率,如图18所示。13SIEMENSSEPTCHENXIANFENG2008-10-21图18设置带阻滤波器来衰减速度调节器的共振频率常规的PI调节器在抗干扰响应特性方面优势并不明显,因此采用参考模型PI调节器,其频率响应Bode图如图19所示。14SIEMENSSEPTCHENXIANFENG2008-10-21图19参考模型PI调节器的Bode图15SIEMENSSEPTCHENXIANFENG2008-10-21图20几个带阻滤波器设置的例子位置环调节的特点是,在作为位置环输入的基准量与作为其输出的位置反馈(位置检测装置检测出来)之间,形成一个闭环路径。位置环调节中起决定性作用的是伺服因子Kv值以及位置环的纯时滞总和Td。图21所示为位置环调节频率响应Bode图。16SIEMENSSEPTCHENXIANFENG2008-10-2117SIEMENSSEPTCHENXIANFENG2008-10-2118SIEMENSSEPTCHENXIANFENG2008-10-21图20位置环调节频率响应Bode图加速度限制以及脉动限制在位置环调节中的影响,如图21所示。19SIEMENSSEPTCHENXIANFENG2008-10-2120SIEMENSSEPTCHENXIANFENG2008-10-21图21加速度限制以及脉动限制在位置环调节中的影响21
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 carloshll
carloshll
本文标题:SINUMERIK 840D_810D驱动优化基础与分析
链接地址:https://www.777doc.com/doc-4357974 .html