您好,欢迎访问三七文档
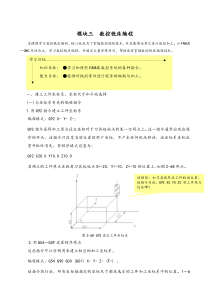
SAR的点目标仿真-1-合成孔径雷达(SAR)的点目标仿真一.SAR原理简介合成孔径雷达(SyntheticApertureRadar,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。SAR回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:2rrCB,式中r表示雷达的距离分辨率,rB表示雷达发射信号带宽,C表示光速。同样,SAR回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:aaavB,式中a表示雷达的方位分辨率,aB表示雷达方位向多谱勒带宽,av表示方位向SAR平台速度。二.SAR的成像模式和空间几何关系根据SAR波束照射的方式,SAR的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图2.1。条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。图2.1:SAR典型的成像模式这里分析SAR点目标回波时,只讨论正侧式StripmapSAR,正侧式表示SAR波束中心和SAR平台运动方向垂直,如图2.2,选取直角坐标系XYZ为参考坐标系,XOY平面为地平面;SAR平台距地平面高h,沿X轴正向以速度V匀速飞行;P点为SAR平台的位置矢量,设其坐标为(x,y,z);T点为目标的位置矢量,设其坐标为(,,)TTTxyz;由几何关系,目标与SAR平台的斜距为:222()()()TTTPTxxyyzz(2.1)由图可知:0,,0Tyzhz;令xvs,其中v为平台速度,s为慢时间变量(slowtime),假设Txvs,其中s表示SAR平台的x坐标为Tx的时刻;再令22TrHy,r表示目SAR的点目标仿真-2-标与SAR的垂直斜距,重写2.1式为:2220(;)()PTRsrrvss(2.2)(;)Rsr就表示任意时刻s时,目标与雷达的斜距。一般情况下,0vssr,于是2.2式可近似写为:2222200(;)()()2vRsrrvssrssr(2.3)可见,斜距是sr和的函数,不同的目标,r也不一样,但当目标距SAR较远时,在观测带内,可近似认为r不变,即0rR。图2.2:空间几何关系(a)正视图(b)侧视图图2.2(a)中,Lsar表示合成孔径长度,它和合成孔径时间Tsar的关系是LsarvTsar。(b)中,为雷达天线半功率点波束角,为波束轴线与Z轴的夹角,即波束视角,minR为近距点距离,maxR为远距点距离,W为测绘带宽度,它们的关系为:22min()max()maxminRHtgRHtgWRR(2.4)SAR的点目标仿真-3-三.SAR的回波信号模型SAR在运动过程中,以一定的PRT(PulseRepititionTime,脉冲重复周期)发射和接收脉冲,天线波束照射到地面上近似为一矩形区域,如图2.2(a),区域内各散射元(点)对入射波后向散射,这样,发射脉冲经目标和天线方向图的调制,携带目标和环境信息形成SAR回波。从时域来看,发射和接收的信号都是一时间序列。图3.1:SAR发射和接收信号图3.1表示SAR发射和接收信号的时域序列。发射序列中,Tr为chirp信号持续时间,下标r表示距离向(Range);PRT为脉冲重复周期;接收序列中,2*(;)nRsrC表示发射第i个脉冲时,目标回波相对于发射序列的延时;阴影部分表示雷达接收机采样波门,采样波门的宽度要保证能罩住测绘带内所有目标的回波。雷达发射序列的数学表达式为:22()()()()crnjftjKtstptnPRTtptrecteeTr(3.1)式中,()rect表示矩形信号,rK为距离向chirp信号的调频斜率,cf为载频。雷达回波信号由发射信号波形,天线方向图,斜距,目标RCS,环境等因素共同决定,若不考虑环境因素,则单点目标雷达回波信号可写成:()p(PRT)rnnstwtn(3.2)式中,为点目标的雷达散射截面,w表示点目标天线方向图双向幅度加权,n表示载机发射第n个脉冲时,电磁波在雷达与目标之间传播的双程时间,2(;)nRsrC,代入3.2式22(;)/()()exp[(2(;)/)]4exp[;]exp[2()]rnrrcntnPRTRsrCstwrectTjKtnPRTRsrCjRsjftnPRT(r)(3.3)3.3式就是单点目标回波信号模型。其中,2exp[(2(;)/)]rjKtnPRTRsrC为chirpSAR的点目标仿真-4-分量,它决定距离向分辨率,4exp[;]jRs(r)为doppler分量,它决定方位向分辨率。距离向变量s远大于方位向变量t(典型相差510量级),于是一般可以假设SAR满足“停-走-停”模式,即SAR在发射和接收一个脉冲信号中间,载机未发生运动。为了理论分析方便,称s为慢时间变量(slowtime),称t为快时间变量(fasttime)于是,一维回波信号可以写成二维形式,正交解调去除载波后,单点目标的回波可写成:22(;)/(,;)()exp[(2(;)/)]4()exp[(;)]rrtRsrCsstrrectjKtRsrCTrsrectjRsrTsar(3.3)图3.2:单点目标回波二维分布示意图在方位向(慢时间域)是离散的,0/snPRTxV,其中V是SAR的速度,0x是0时刻目标在参考坐标系中的x坐标。为了作数字信号处理,在距离向(快时间域)也要采样,假设采样周期为Tr,则rtmT,如图3.2,方位向发射N个脉冲,距离向采样得到M个样值点,则SAR回波为一NM矩阵,K个理想点目标的回波经采样后的表达式为:12(;)4(,)exp{[()]}exp[(;)]2(;)[()];|(;)()|1,2,3;1,2,3KkRnkSrnmjtmjRnkCRnktmTrRnkxkTsarCnNmM(3.4)SAR的点目标仿真-5-上式用Matlab语言可表示为:%%***************************************************************************%%GeneratetherawsignaldataK=Ntarget;%numberoftargetsN=Nslow;%numberofvectorinslow-timedomainM=Nfast;%numberofvectorinfast-timedomainT=Ptarget;%positionoftargetsSrnm=zeros(N,M);fork=1:1:Ksigma=T(k,3);Dslow=sn*V-T(k,1);R=sqrt(Dslow.^2+T(k,2)^2+H^2);tau=2*R/C;Dfast=ones(N,1)*tm-tau'*ones(1,M);phase=pi*Kr*Dfast.^2-(4*pi/lambda)*(R'*ones(1,M));Srnm=Srnm+sigma*exp(j*phase).*(0Dfast&DfastTr).*((abs(Dslow)Lsar/2)'*ones(1,M));end%%***************************************************************************四.SAR的信号系统模型从信号与系统的角度看,SAR回波可看作目标的散射特性通过一个二维线性系统的输出。点目标的信号与系统模型如图4.1:图4.1:点目标信号与系统模型模型的数学表达式为:,(,;)[()()](,;)rstsstrsthstr(4.1)式中,()()st表示点目标的散射特性,(,;)hstr表示等效系统,设()pt为发射的chirp信号,则:2222(,;)2(,;)()()RstrrvshstrptptCC(4.2)4.2式表明(,;)hstr只在(,)st维是线性时不变(LTI)的,在r维是时变的,相同的(,)st,不同的r,响应(,;)hstr不一样。但通常情况下可近似认为r不变,即0rR,这时,系统等效为一个二维LTI系统。SAR的点目标仿真-6-五.点目标SAR的成像处理算法仿真SAR的回波数据不具有直观性,不经处理人无法理解它,如图5.1。从原理上讲,SAR成像处理的过程是从回波数据中提取目标区域散射系数的二维分布,本质上是一个二维相关处理过程,因此最直接的处理方法是对回波进行二维匹配滤波,但其运算量很大,再加上SAR的数据率本来就高,这使得实时处难于实现。通常,可以把二维过程分解成距离向和方位向两个一维过程,Range-DopperAlgorithm(简称RD算法)就是采用这种思想的典型算法,这里也只讨论RD算法。图5.1:SAR回波数据(a)未经处理(b)处理后RD算法通过距离迁移(RangeMigration)矫正,消除距离和方位之间的耦合。在满足聚焦深度的前提小,将成像处理分解成两个一维的LTI系统进行相关处理,并采用频域快速相关算法提高了速度。RD算法已非常成熟,并成为衡量其它算法优劣的标准。RD算法典型的数字处理流程如图5.2。图5.2:Range-Dopper算法流程●预处理这是对SAR回波处理的第一步,一般在SAR平台(卫星,飞机)上实时处理,包括解调和数字化。雷达信号的载频较高(~GHz),不宜直接采样数字化处理,常常通过正交解调方式解调出基带信号,再对基带信号(~MHz)采样数字化,然后存储或传到地面做进一步处理。采样后的数据常采用矩阵形式存储,假设方位向发射(采样)N个脉冲,距离向采样得到M每个采样值(图3.2),则待处理数据是一个NM的矩阵,如图5.3。实际处理时,要在方位向上加窗截断,因此,在方位向上的开始和结束的一段数据(图中影阴区所示)是不充分的,对应的长度均为/2Lsar,Lsar表示SAR的合成孔径长度。仿真时,这个数据阵是程序根据3.4SAR的点目标仿真-7-式产生的。图5.3:待处理数据●距离压缩距离向信号是典型的Chirp信号,相关算法是在频域利用FFT进行的。Matlab语句为:Refr=exp(j*pi*Kr*tr.^2).*(0tr&trTr);Sr=ifty(fty(Srnm).*(ones(N,1)*conj(fty(Refr))));Kr和Tr分别是Chirp信号的调频斜率和脉冲持续时间,Refr表示参考信号,fty,ifty是对矩阵的行(对应距离向)进行FFT和IFFT运算的子程序。例如,fty的代码为:%%FFTinrowofmatrixfunctionfs=fty(s);fs=fftshift(fft(fftshift(s.'))).';●距离迁移矫正距离迁移是SAR信号处理中必然出现的现象,它的大小随系统参数不同而变化,并不总需要补偿。点目标仿真时,可以先不考虑。●方位压缩方位向的处理是SAR成像处理算法最核心的部分。正侧式点目标(图2.2)情况下,回波经距离压缩后在方位向也是一Chirp信号,因此其压缩处理同距离压缩处理类似,只是压缩因子不同。仿真中,调频斜率Ka已知,因此不需要进行Doppler参数估计。●SAR参
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 blloodiroul
blloodiroul
本文标题:点目标仿真_SAR
链接地址:https://www.777doc.com/doc-5937519 .html