您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 信息化管理 > 飞机飞行参数数据预处理方法研究
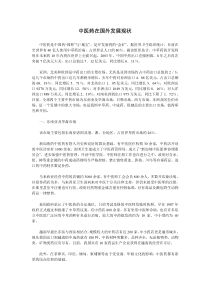
第39卷第3期2017年6月指辉控制与仿真CommandControl&SimulationYol.39No.3Jun.2017文章编号:1673-3819(2017)03-0121-05飞机飞行参数数据预处理方法研究金慧琴,王正磊,胡文春(1.海军航空工程学院,山东烟台264001;2.92074部队,浙江宁波315000)摘要:飞行参数数据的处理对飞机的飞行安全至关重要,而飞行参数数据的误差会显著影响飞行参数数据处理的结果。分析飞行参数数据误差的基本组成,研究飞行参数数据误差中非常规误差的消除方法,给出了四种适用于对不同类型飞行参数数据进行异值剔除与缺失数据估计的方法,仿真结果表明这四种方法大大提高了飞行参数数据的有效性,使飞行参数数据后期处理更便利。关键词:飞参数据;数据处理;异值剔除中图分类号:TP391;E917文献标志码:AD0I:10.3969/j.issn.1673-3819.2017.03.026AResearchonPreprocessingMethodsofFlightDataJINHui-qin,WANGZheng-lei,HUWen-chun(1.NavalAeronauticalandAstronauticalUniversity,Yantai264001;2.92074Unit,Ningbo315000,China)Abstract:Theprocessingofflightdataisveryimportantfortheaircrafts’safety.However,erroronflightdatacansignificantlyinfluencetheprocessingresults.Onanalyzingthebasiccompositionsoferroronflightdataandtheeliminationmethodsofunconventionalerroronflightdata,errorisclassifiedandfourmethodsofdifferentvaluesrejectionandmissingdataestimationarepresentedaccordingtodifferenttypeflightdata.Theresultofthesimulationshowsthatthefourmethodsgreatlyimprovetheeffectivenessandcanbeconvenientforpost-processingofflightdata.1.1随机误差随机误差是指由于在测定过程中一系列有关因素微小的随机波动而造成的具有相互抵偿性的误差。随机误差是飞行参数误差中较为常见的一种,由一些微弱因素和未知因素造成,例如飞机零部件的细微变形、数据传输线路的细微影响等。随机误差无法进行预测,但统计特性在设定时间段内是已知的,因此可以通过大量采集数据的方式进行研究,获取统计规律。1.2系统误差系统误差是指由于仪器结构不完善、仪器未校准、本身理论近似性、测量方法不好或测量者生理特点等原因造成的误差。系统误差由系统本身的设计条件和工作状况决定,例如随地球经纬度变化的磁场,随发动机转速变化的排气温度等。系统误差可以用于检测故障,根据实测数据与期望数据之间的偏差情况,可以发现存在的异常并进行判读。系统误差始终对测量造成影响,具有较强的规律性,通常可以使用函数近似表示,便于通过数学方法进行消除。1.3非常规误差非常规误差是指由于特殊条件或者突发故障造成的严重误差。非常规误差一般由外界干扰造成,是飞行参数数据中间断点和异常值的主要来源,例如电子战干扰、线路接触不良等。非常规误差没有固定规律,也难以掌握统计特性,其突发性和严重性容易引起数Keywords:flightdata;dataprocessing;valuesrejection飞机在飞行过程中,机载飞行参数记录器实时记录大量的飞行参数数据,在飞行结束后,可对记录器中记录的飞行参数数据进行分析,确定飞机的状态,其结果是再次飞行的依据,对飞机的飞行安全至关重要[|-2]。飞行参数数据的记录过程中,受采集设备故障和随机因素的影响,会造成错误记录,这些错误记录成为误码;同时环境因素的变化和干扰也会引起异常值的出现。因此,在使用飞行参数数据之前,还须对其进行预处理以提高数据的有效性[3]。本文通过分析不同数据的误差来源,针对不同类型和情况的飞行参数数据误差,给出了四种不同的方法对飞行参数数据进行了异值剔除和缺失值的估计。1飞行参数数据误差分类飞行参数数据的误差会明显地影响飞行参数数据处理的结果,尤其在分析飞机不稳定状态的时候,飞行参数数据的误差主要分为随机误差、非常规误差、系统误差、处理误差四种[4]。收稿日期:2017-03-07修回日期:2017-03-29作者简介:金慧琴(1964-),女,硕士,副教授,研究方向为通信与导航。王正磊(1992-),男,硕士研究生。胡文春(1975-),男,高级工程师。122金慧琴,等:飞机飞行参数数据预处理方法研究第39卷2.2差分法法中有所应用。《次多项式的一项重要性质是其《+1用多项式逼近一连续函数是一种函数逼近的常用阶导数恒为零,以此得出一种处理飞行记录数据中确方法,在实际的数据分析和处理的许多插值和滤波方定信号的近似方法[6]。假设可用《-1次多项式去逐010203040时间/s(a)50102030时间/s(b)图1飞行参数数据的非常规误差消除4050本文所研究的误差消除,主要是上述误差中不满足统计特性的数据,包括非常规误差和其他误差中统计特性不明显的部分,这些数据称为异值。下面给出飞行参数数据异值剔除和参数估计的四种方法。2.1增量法该方法主要针对一些有确定边界的连续信号进行处理,消除那些偏离正常值较大的异值,只是针对飞行参数数据的粗处理[4_5]。对连续信号/(〇,其离散序列/(^)的增量A/;=/(tk)-/(tk-,)(1)有界,即存在常数A使对于任意的A,有l/(tj-/(tk—,)I矣A(2)据此,可取一正数A,,简记/(t)的序列/(tk)为入,对其异常值作如下判断:如果1/k-/k-i1A/,1/1+i-/,1A/及1/k+i-/k-iI2A,,则判断义是单重异值;如果1/k_/k-l1A/,1/1+2_/1+l1A/,及1/…-人-iI3A/,则判断/k/k+i是二重异值;飞行数据曲线(未消除误差)2飞行参数数据误差的预处理方法据“阶跃”或系统故障。1.4处理误差处理误差是指由于数据采集和处理方法的固有缺陷或者操作不当造成的误差。处理误差主要在数据分析处理时产生,例如试验数据的编译码误差和一次处理误差等。处理过程中采用的不同算法自身存在固有缺陷,编译码过程存在误码率,导致处理误差无法消除,但可以通过数据分析总结出一定的规律。如果I/k_/k-iIA/,I/,+3_/,+2IA,,及I/k+3--iI4A,,则判断/k/k+i/k+2是三重异值。异值的替换采用线性插值法,具体描述如下:对于单重异值/k的替换为:(/k-i+/k+i)/k=2(3)对于二重异值/k/k+i的替换分别为://(/k+2-/k-i)•/k*/k-i+3(4)八2(/k+2-/k-i)Jk+i./k-i3(5)对于三重异值/k/k+i/k+2的替换分别为://3-i)•/k*/k-i+4(6)//3-i)Jk+iJk-i2(7)3(/k+3-/k-i)Jk+iJk-i4(8)然而Az的确定并非易事,一般选取A,=sA,(9)其中s0是一常数,而\、卖i-/1-ii(i0)在非交叉滑动区间,单一、双重、三重误差可依据上述方法逐次进行修正。飞行参数数据非常规误差消除的仿真结果如图i所示,采用以上算法可消除飞行参数数据中存在的单一、双重、三重非常规误差。„飞行数据曲线(消除误差)05052110505211第3期指辉控制与仿真123段近似函数/(〇,/(L)为其离散值序列,其n阶差分g(d(-iycui=0其中C=—nl_____(n-i)\i!于是对于记录数据序列L二f(h)+n式中,n■为误差,其n阶差分为(11)(12)(13)观测值的差值在门限附近变化时,就难以决断是否把它们按照异常值处理[7]。针对这种“拖尾”的正态分布含斑点异值的数据,提出一种“抗干扰”的估计方法,即稳健估计。通过稳健的线性模型系数辨识法,逐点进行异值的辨识与修复[8]。假定某一飞行参数数据集合为到/“),••■/(0丨(17)由于目标运动的连续性,可以假定测量对象/(〇可合理地分解成3部分:匕二1(-1yc:fkHi=0=g(fk)+Z(-1)'CnVkHi=0=Z(-1)'C:Vk,i(14)i=0由此可知,&是nk的n阶差分的一个近似。据此,可作出nk的n阶差分序列方差的一个估计:(15)假设nk服从正态分布,那么由统计学可知对于〇.〇5的假设检验显著水平,当1&1彡1.967^2(16)时,可判定&是异常值,又由&的定义得出/k,/k+,,…,/k+„中有一个异常值。根据经验以及么本身的定义,当判定&异常时,相应地判定/k+„,2(n为偶数)或/k+„,2和/k+„/2+l(n为奇数)为异常值较为合理。依据上述方法,异常值仍然可以被判定为二重、三重。仅以至多三重异常值为限,对于更多重的可以用分组的方法进行。差分法是一种统计处理的方法,判断比较准确,异常值的剔除相较增量法更为精确。2.3稳健异值检测与修复方法对于飞机的气动参数,在飞行参数数据处理时要求有更高的精度,在实际数据的异常值处理中,经常遇到门限值的选取影响异常值的判断问题。当外推值与/(0=/„(0+'(〇+£。(〇(18)式中,y„(〇称为趋势分量,描述的是参数的趋势项,以〇是数据随机误差分量,。(〇为过程的污染分量或突变性分量,其作用结果是使数据发生严重偏离。假定:在有限时段上,气动参数符合的函数/(〇是几乎处处连续、按段光滑的,可以被代数多项式与三角多项式的线性组合一致逼近,即'(0+'(0(19)其中,r为周期性变化分量//〇的演变周期。改写为线性回归模型的形式:/“)-—X(t,)S(t,)13+/(tN)--^(tN)^(tN)式中,—(•/2n)^尤⑴二(M,…,“體,…,cos(r^sin[r//3=(«0,《,,…,a,A,…人,C|,…,c„)T(20)(21)(22)?(〇='(〇+?0(〇(23)下面给出估计方程(20)的一组迭代求解算法[9]:并置初值为:(N——v-1N、Z—(£i)—(£,))U)1i二1i二1/^i)-力i)苔(;)CT(;)1〜^JN-(l+m+n+1)J(瓜)-屮爲)”(广l2,…))(N——\-1N:(oT—(〇)(*,广/(〇,为0的最小二乘估计i=1'i=1-►_CT(0=medi^1,N{Iy(ti)-X(ti)/3(〇I1(24)(25)利用上述估计值艮不难给出测量对象/(t)的具有抗异值干扰能力的稳健拟合曲线:124金慧琴,等:飞机飞行参数数据预处理方法研究第39卷7(0=ZZ^jZ^sin〔^fj(26)在数据预处理时,经常使用下列几种函数。Huber型:{W1^1^0IWIC(27)hampel型:sign(〇))I〇)IIwI^sien(w)aa^Iw\^b中(w)=j(28)sign(c-IwI)/(c-bb)^IwI^c0IwIc式中,0abc,a,b,c为根据数据和经验适当选取的非负常数。对于飞行参数数据离散度较大的数据利用hampel型重衰减函数的效果更佳[1。]。并且在工程中a,b,c可取a=3〜,b=15a,c=〜,令1=〇6745,^—为基准段残差中值的绝对值,0.6745使得估计对于正态分布而言是无偏的。稳健异值数据的检测与修复方法步骤如下:1)首先根据数据规律构造一条具有稳健特性的平滑函数(确定模型、阶次)。2)选取基准段,一般为初始段,计算出基准段3)用稳健预测基准段中点的状态值,与实际量测
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 181655769
181655769
本文标题:飞机飞行参数数据预处理方法研究
链接地址:https://www.777doc.com/doc-6982428 .html