您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 制造加工工艺 > 华兴数控系统21DT
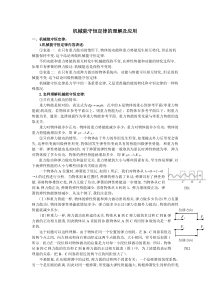
21DT液晶显示车床数控系统编程与操作南京华兴数控设备有限责任公司●南京华兴数控设备有限责任公司保留在不通知用户的情况下随时修改所有功能及规格的权利。在本说明书中,我们将尽力叙述各种可能的操作及事件,但是我们不对所有的可能性进行叙述。电子版版本号:华兴数控目录第一章圆员阅栽系统概述员援员圆员阅栽系统指标噎噎噎噎噎噎渊员冤员援员援员主要规格噎噎噎噎噎噎渊员冤员援员援圆系统资源噎噎噎噎噎噎渊员冤员援圆坐标系规定噎噎噎噎噎渊员冤员援圆援员相对于静止的工件而运动的原则噎噎噎噎噎噎噎噎噎噎渊员冤员援圆援圆标准坐标系的规定噎噎噎渊员冤员援圆援猿机床运动部件方向的规定噎渊圆冤员援圆援源机床参考点噎噎噎噎噎渊圆冤员援圆援缘工件坐标系噎噎噎噎噎渊圆冤员援圆援远换刀时刀补的原理噎噎渊圆冤第二章编程圆援员程序段格式噎噎噎噎噎噎渊源冤圆援员援员参变量噎噎噎噎噎噎噎噎渊缘冤圆援圆准备功能穴郧功能雪噎噎噎噎渊远冤圆援圆援员郧园园要快速定位噎噎噎噎渊苑冤圆援圆援圆郧园员要直线插补噎噎噎噎噎渊苑冤圆援圆援猿郧园圆要顺圆弧插补噎噎噎渊愿冤圆援圆援源郧园猿要逆圆弧插补噎噎噎渊愿冤圆援圆援缘郧园源要暂停噎噎噎噎噎噎渊愿冤圆援圆援远郧圆园要子程序调用噎噎噎噎渊怨冤圆援圆援苑郧圆圆要子程序定义噎噎噎噎渊怨冤圆援圆援愿郧圆源要子程序结束返回噎渊怨冤圆援圆援怨郧圆缘要跳转移加工噎噎噎渊员园冤圆援圆援员园郧圆远要转移加工穴程序内部子程序调用雪噎噎噎噎噎渊员园冤圆援圆援员员郧圆苑要无限循环噎噎噎渊员员冤圆援圆援员圆郧猿园要放大缩小倍率取消噎噎噎噎噎噎噎噎噎噎渊员员冤圆援圆援员猿郧猿员要放大或缩小倍率噎渊员员冤圆援圆援员源郧源苑要短直线速度自动过渡噎噎噎噎噎噎噎噎噎噎噎渊员员冤圆援圆援员缘郧源愿要取消郧源苑噎噎噎渊员员冤圆援圆援员远郧缘猿要撤消零点偏置噎噎渊员员冤圆援圆援员苑郧缘源要绝对零点偏置噎噎渊员圆冤圆援圆援员愿郧缘缘要增量零点偏置噎噎渊员圆冤圆援圆援员怨郧缘远要当前点偏置噎噎渊员圆冤圆援圆援圆园郧苑源要返回参考点穴机械原点雪噎噎噎噎噎噎噎噎噎噎渊员猿冤圆援圆援圆员郧苑缘要从参考点返回对刀点噎噎噎噎噎噎噎噎噎噎渊员猿冤圆援圆援圆圆郧苑远要从当前位置返回加工起始点穴进刀点雪噎噎噎噎渊员猿冤圆援圆援圆猿郧苑苑要恢复当前坐标系噎渊员猿冤圆援圆援圆源郧愿员要外圆穴内圆雪固定循环噎噎噎噎噎噎噎噎噎噎渊员猿冤圆援圆援圆缘郧愿圆要端面固定循环噎噎渊员缘冤圆援圆援圆远郧怨园要绝对值方式编程噎渊员苑冤圆援圆援圆苑郧怨员要增量方式编程噎噎渊员愿冤圆援圆援圆愿郧怨圆要设定工件坐标系噎渊员愿冤圆援圆援圆怨郧愿远要公制螺纹加工循环噎噎噎噎噎噎噎噎噎噎渊员愿冤圆援圆援猿园郧愿苑要英制螺纹循环噎噎渊圆园冤圆援圆援猿员郧愿缘要攻丝循环噎噎噎渊圆园冤圆援圆援猿圆郧怨远要恒线速切削噎噎渊圆园冤圆援圆援猿猿郧怨苑要取消恒线速切削噎渊圆员冤圆援猿辅助功能穴酝功能雪噎噎噎噎渊圆员冤圆援猿援员酝园园要程序暂停噎噎噎噎渊圆员冤圆援猿援圆酝园员要条件暂停噎噎噎噎渊圆圆冤圆援猿援猿酝园圆要程序结束噎噎噎噎渊圆圆冤圆援猿援源酝园猿要主轴正转噎噎噎噎渊圆圆冤圆援猿援缘酝园源要主轴反转噎噎噎噎渊圆猿冤圆援猿援远酝园缘要主轴停止旋转噎噎渊圆猿冤圆援猿援苑酝园愿要开冷却液噎噎噎噎渊圆源冤圆援猿援愿酝园怨要关冷却液噎噎噎噎渊圆源冤圆援猿援怨酝员园要工件夹紧噎噎噎噎渊圆源冤圆援猿援员园酝员员要工件松开噎噎噎噎渊圆源冤圆援猿援员员酝圆园要开指定的继电器噎渊圆源冤目录1华兴数控目录圆援猿援员圆酝圆员要关指定的继电器噎渊圆缘冤圆援猿援员猿酝圆源要设定刀补号噎噎渊圆缘冤圆援猿援员源酝猿园要返回程序头噎噎渊圆缘冤圆援猿援员缘酝苑员耀酝愿缘要酝功能脉冲输出噎噎噎噎噎噎噎噎噎噎渊圆缘冤圆援猿援员远输出接口尧编程尧继电器号对照表噎噎噎噎噎噎噎噎噎渊圆缘冤圆援源云尧杂尧栽功能噎噎噎噎噎噎噎渊圆远冤圆援源援员云要进给功能噎噎噎噎噎渊圆远冤圆援源援圆杂要主轴转速控制噎噎噎渊圆远冤圆援源援猿栽要刀具功能噎噎噎噎噎渊圆远冤圆援源援源轴选择功能噎噎噎噎噎噎渊猿园冤圆援源援缘坐标修调功能噎噎噎噎噎渊猿园冤第三章系统操作猿援员数控系统的操作键盘噎噎渊猿员冤猿援员援员主功能键噎噎噎噎噎噎噎渊猿圆冤猿援员援圆编辑字符键噎噎噎噎噎噎渊猿圆冤猿援员援猿手工操作机床时坐标进给及进给参数设置噎噎噎噎噎渊猿圆冤猿援员援源软定义键云员耀云缘噎噎噎噎渊猿圆冤猿援员援缘其他噎噎噎噎噎噎噎噎渊猿猿冤猿援圆开机噎噎噎噎噎噎噎噎噎噎渊猿缘冤猿援圆援员开机顺序噎噎噎噎噎噎渊猿缘冤猿援圆援圆主功能选择噎噎噎噎噎噎渊猿缘冤猿援圆援猿子功能选择噎噎噎噎噎噎渊猿远冤猿援猿孕砸郧砸酝渊程序冤主功能噎噎噎渊猿远冤猿援猿援员程序名输入原则噎噎噎噎渊猿远冤猿援猿援圆程序编辑噎噎噎噎噎噎噎渊猿苑冤猿援猿援猿复制尧删除和程序状态噎渊猿愿冤猿援猿援源更名尧输入和输出功能噎渊猿怨冤猿援猿援缘列表噎噎噎噎噎噎噎噎噎渊源园冤猿援源韵孕耘砸栽渊加工冤主功能噎噎渊源园冤猿援源援员自动循环渊含任意段号处起动加工冤噎噎噎噎噎噎噎噎噎渊源员冤猿援源援圆手动操作机床噎噎噎噎噎渊源圆冤猿援源援猿返回机床零点噎噎噎噎噎渊源圆冤猿援源援源手轮渊手摇脉冲发生器冤噎渊源圆冤猿援源援缘系统状态设置噎噎噎噎渊源猿冤猿援源援远酝阅陨操作方式噎噎噎噎渊源猿冤猿援缘图形显示功能噎噎噎噎噎噎渊源猿冤猿援缘援员图形显示功能的画面进入顺序噎噎噎噎噎噎噎噎噎噎噎渊源源冤猿援缘援圆图形显示功能画面选择噎渊源源冤第四章孕粤砸粤酝渊参数冤功能源援员圆员阅栽参数体系噎噎噎噎噎渊源远冤源援圆参数的基本概念噎噎噎噎噎渊源苑冤源援圆援员加减速时间常数噎噎噎噎渊源苑冤源援圆援圆加速度噎噎噎噎噎噎噎噎渊源苑冤源援圆援猿电子齿轮比噎噎噎噎噎噎渊源愿冤源援圆援源参数密码噎噎噎噎噎噎噎渊源愿冤源援猿系统参数渊孕参数冤噎噎噎噎渊源愿冤源援猿援员孕参数的意义噎噎噎噎渊源怨冤源援源位参数噎噎噎噎噎噎噎噎噎渊缘员冤源援源援员进入噎噎噎噎噎噎噎噎噎渊缘员冤源援源援圆位参数设置噎噎噎噎噎噎渊缘圆冤源援缘螺距误差补偿噎噎噎噎噎噎渊缘缘冤源援缘援员螺距误差补偿须注意的问题噎噎噎噎噎噎噎噎噎噎噎噎渊缘远冤源援缘援圆螺距误差补偿举例噎噎渊缘远冤源援远主轴噎噎噎噎噎噎噎噎噎噎渊缘苑冤源援苑刀具参数噎噎噎噎噎噎噎噎渊缘苑冤源援愿坐标修调噎噎噎噎噎噎噎噎渊缘愿冤源援怨诊断渊外部输入信号监测冤噎渊缘愿冤源援员园系统置零噎噎噎噎噎噎噎渊缘愿冤源援员园援员清内存噎噎噎噎噎噎噎渊缘怨冤源援员园援圆格式化噎噎噎噎噎噎噎渊缘怨冤源援员园援猿设置口零噎噎噎噎噎噎渊缘怨冤源援员园援源备份噎噎噎噎噎噎噎噎渊远园冤源援员员关机尧开机噎噎噎噎噎噎渊远园冤附录一出错报警噎噎噎噎噎噎噎噎渊远圆冤附录二系统介面一览噎噎噎噎噎噎渊远源冤附录三编程实例噎噎噎噎噎噎噎噎渊远远冤2华兴数控第一章圆员阅栽系统概述卡盘垣在垣载第一章圆员阅栽系统概述员援员圆员阅栽系统指标员援员援员主要规格脉冲当量院载院园援园园员皂皂在院园援园园员皂皂控制辕联动轴数院圆辕圆编程范围院原怨怨怨怨援怨怨怨耀垣怨怨怨怨援怨怨怨皂皂快进速度院远园园园园皂皂辕皂蚤灶穴园援园园员皂皂当量雪程序容量院电子盘员圆愿运袁可存储猿园个程序插补院直线袁圆弧袁公尧英制直辕锥尧多头辕单头螺纹员援员援圆系统资源显示院采用远义液晶屏袁猿圆园载圆源园点阵电子盘院员圆愿运月闪存袁保存程序状态及参数输入信号院圆源路开关量袁光电隔离手轮接口院员路袁员尧员园尧员园园倍率编码器接口院员路袁四倍频处理输出信号院员苑路开关量遥其中员圆路继电器功率驱动输出和缘路继电器触点输出载尧在两个方向步进电机驱动信号渊悦孕尧悦宰冤输出一路愿位模拟量输出袁园原缘灾或园原员园灾串行口院砸杂圆猿圆悦异步串行口员援圆坐标系规定在数控机床上加工零件时袁刀具与零件的相对运动袁必须在确定的坐标系中才能按规定的程序进行加工遥为了便于编程时描述机床的运动袁简化程序的编制方法袁保证记录数据的互换性袁数控机床的坐标和运动方向均已标准化遥机械工业部于员怨愿圆年颁布了允月猿园缘员要愿圆数字控制机床坐标和运动方向的命名标准袁其命名原则和规定如下院员援圆援员相对于静止的工件而运动的原则遥这一原则是为了编程人员能够在不知道是刀具移动袁还是工件移动的情况下袁就能够依据零件图纸袁确定机床的加工过程遥员援圆援圆标准坐标系的规定1第一章圆员阅栽系统概述华兴数控标准坐标系是一个直角坐标系遥如右图院这个坐标系的各个坐标轴与机床主要导轨相平行遥员援圆援猿机床运动部件方向的规定机床的某一运动部件的运动正方向袁是增大刀具和工件距离的方向遥员援圆援猿援员在坐标运动在坐标的运动袁是由传递切削动力的主轴所规定遥在标准坐标系中袁始终与主轴平行的坐标被规定为在坐标遥员援圆援猿援圆载坐标运动载坐标是水平的袁它平行于工件的装夹表面遥载坐标是在刀具或工件定位平面内运动的主要坐标遥在车床上袁规定大拖板沿床身渊纵向冤向尾架侧移动为在坐标正向袁刀架朝摇把方向移动为载坐标正向渊后置刀架正好相反冤遥员援圆援源机床参考点机床参考点也称机械零点袁它是指载尧在两方向沿正向移动到接近极限位置袁感应到该方向参考点开关时所决定的位置遥一台机床是否有回参考点功能袁取决于机床制造商是否安装了参考点开关渊也称机械原点开关冤遥员援圆援缘工件坐标系所有坐标值袁其含义是刀尖相对于坐标原点的位置遥坐标原点不同袁即使刀尖在机床上处于同一绝对位置袁其坐标值也不同遥为了保证加工中刀尖坐标的唯一性袁必须确定坐标原点渊也称零点冤袁而零点位置是由刀尖的位置及坐标值大小反推而得到遥例如院假设刀尖坐标为渊缘园袁圆缘园冤袁则沿载负方向走圆缘皂皂处为载坐标原点曰沿在负方向走圆缘园皂皂处为在坐标原点渊见右图中的粤处冤遥注院在车床上袁规定载方向渊也称横向冤坐标为直径量遥现在假设刀尖位置不变袁而坐标为渊圆园袁员园园冤则零点在图中的月处袁这就是浮动零点的概念遥但请记住袁对于一个加工程序袁必须将零点确定后才能加工袁不得随意改变渊除非通过坐标平移指令冤遥浮动零点一旦确定袁便构成实际加工中使用的工件坐标系遥程序中所有刀尖移动袁均以该坐标系为参考遥坐标零点的确定袁详见郧怨圆指令遥员援圆援远换刀时刀补的原理加工比较复杂的工件时袁往往需要多把刀具遥而加工程序是按其中某一把刀具的刀尖进行编制的袁换刀后袁当前刀尖相对于前一把刀的刀尖在载和在两个方向必定会有偏移袁也就是说即使大小拖板不动袁换刀后刀尖位置会变化袁刀补的作用是来弥补这种变化遥2华兴数控第一章圆员阅栽系统概述例如院当前刀为栽员袁其刀尖位置为粤员曰换成二号刀后渊栽圆冤袁二号刀刀尖处于粤圆位置袁换刀后刀尖坐标由粤员渊载员袁在员冤变为粤圆渊载圆袁在圆冤袁刀补的作用就是将刀尖坐标值由原来的坐标渊载员袁在员冤转换成渊载圆袁在圆冤袁粤员和粤圆在载尧在方向的相对差值是可以预先测出的袁这个值就是数控系统记忆的刀补值遥在实际应用中袁为了简化这一过程袁数控系统不是测出各把刀两两之间的差值袁而采取更简洁的方法来记忆刀补值遥即记忆坐标值的方法来确定遥例如院将每把刀的刀尖沿载尧在方向一一靠上某一固定点穴芯棒或试件雪袁把刀尖刚刚接触这一固定点时作为标准袁由于各把刀的长度不同袁靠到固定点时显示的坐标点也不同遥数控系统分别记忆各把刀靠到时的坐标值遥这些各不相同的坐标值两两之间实际上就包含了这两把刀之间的长度差信息遥在产生刀补值时有多种方法袁圆员阅栽采用的是切一刀后输入工件尺寸的方法袁相当于把轴线作为对刀基准袁可以方便地对出外圆袁内孔等刀具的刀补值袁而且消除了工艺系统弹性变形造成的误差遥3第二章圆员阅栽系统编程华兴数控第二章编程圆援员程序段格式所谓程序段格式袁是指程序段书写规则袁它包括数控机床要执行的功能和执行该功能所需的参数袁一个零件加工程序是由若干程序段组成袁每个程序段又由不同的功能字组成袁车床数控系统常用的功能字如下院数控系统不要求每个程序段都具有上面这些指令袁但在每个程序段中袁指令要遵照一定格式来排列遥每个功能字在不同的程序段定义中可能有不同的定义袁详见具体指令遥圆员阅栽数控系统采用的程序格式是可变程序段格式袁所谓可变
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 zz8tt
zz8tt
本文标题:华兴数控系统21DT
链接地址:https://www.777doc.com/doc-1427880 .html