您好,欢迎访问三七文档
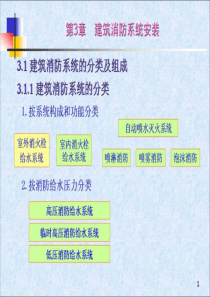
信阳师范学院物理电子工程学院教案自动控制原理第页120第六章控制系统的校正教学时数:10学时教学目的与要求:1.正确理解串联超前、串联滞后、串联滞后—超前三种校正的特性及对系统的影响。2.掌握基本的校正网络及运算电路。3.熟练掌握运用(低、中、高)三频段概念对系统校正前、后性能进行定性分析、比较的方法。4.熟练掌握串联校正(串联超前、串联滞后)的频率域设计步骤和方法。了解串联校正的根轨迹设计步骤和方法。5.正确理解反馈校正的特点和作用。能通过传递函数分解为典型环节的方法,比较说明加入反馈局部校正的作用。6.正确理解对控制作用和对干扰作用的两种附加前置校正的特点、使用条件及其作用,会使用等效系统开环频率特性分析或闭环零、极点比较分析来说明前置校正的作用。7.了解其它一些改善系统性能的手段与方法。教学重点:系统校正设计基础、串联校正、串联校正的理论设计方法、反馈校正、复合校正。教学难点:串联校正及其各种方法。§6-1系统校正设计基础一、性能指标时域:超调量σ%、调节时间st、上升时间rt、无差度、稳态误差和开环增益等。常用频域指标:截止频率:c、相稳定裕度:pm、模稳定裕度:GM、峰值:pM、频率:r、带宽:B。复数域指标:是以系统的闭环极点在复平面上的分布区域来定义。振荡度:φ、衰减度η。图6-1闭环极点的限制区域二、几种校正方式信阳师范学院物理电子工程学院教案自动控制原理第页121图6-2几种校正方式三、校正设计的方法1.频率法2.根轨迹法3.等效结构与等效传递函数方法由于前几章中已经比较详细的研究了单位负反馈系统和典型一、二阶系统的性能指标,这种方法充分运用这些结果,将给定结构等效为已知的典型结构进行对比分析,这样往往使问题变得简单。§6-2串联校正图6-4系统的串联校正例6-1图6-6例6-1的bode图信阳师范学院物理电子工程学院教案自动控制原理第页122单位负反馈系统原来的开环渐近幅频特性曲线和相频特性曲线如图6-6所示,它可以看作是根据给定稳定精度的要求,而选取的放大系数K所绘制的。从以上的例子可以看出超前校正,可以用在既要提高快速性,又要改善振荡性的情况。图6-7无源微分网络通常式(6—1)的传递函数可以通过图6—7所示的无源网络来实现。利用复数阻抗的方法不难求出图6—7所示网络的传递函数为11()11caTsGsaaTs122RRaR1212RRTCRR例6-2单位负反馈系统原有的开环Bode图如图6—9中曲线所示。曲线1L可以看作是根据稳态精度的要求,所确定的开环放大系数而绘制。系统动态响应的平稳性很差或不稳定,对照相频曲线可知,系统接近于临界情况。图6-9例6-2对应的波特图注意:由于校正环节的相位滞后主要发生在低频段,故对中频段的相频特性曲线几乎无影响。因此校正的作用,是利用了网络的高频衰减特性,减小系统的截止频率,从而使稳定裕度增大,保证了稳定性和振荡性的改善,因此可以认为,滞后校正是以牺牲快速性来换取稳定性和改善振荡性的。例6—3设单位负反馈系统未校正时的对数频率特性如图6—10中曲线所示,校正网络对应的幅频特性如图中曲线所示。由图可见,并未改变低频段的斜率与高度,这说明稳态精度并未由于滞后校正而直接改善。通过提供了通过增加开环放大系数,提高低频区幅频特性高度的可能性。信阳师范学院物理电子工程学院教案自动控制原理第页123图6-10例6-3对应的波特图通常式(6-5)的传递函数可以通过图6-11所示的无源网络来实现图6-11无源网络212()1()()()1ccrUsRCsGsUsRRCs三、滞后-超前校正为了全面提高系统的动态品质,使稳态精度、快速性和振荡性均有所改善,可同时采用滞后与超前的校正,并配合增益的合理调整。鉴于超前校正的转折频率应选在系统中频段,而滞后校正的转折频率应选在系统的低频段,因此可知滞后—超前串联校正的传递函数的一般形式应为1212(1)(1)()(1)(1)cbTsaTsGsTsTs(6-7)121,1abbTaT式(6—7)的传递函数可用图6—12的无源网络来实现。图6-12无源网络图6—12所示的无源网络,它的传递函数为:信阳师范学院物理电子工程学院教案自动控制原理第页1241(1)(1)()(1)(1)abcabTsTsGsaTsaTs(6-10)11aTRC22bTRCbaTT1a式(6-10)中前一部分为相位超前校正,后一部分为滞后校正。对应的波特图如图6-13。由图看出不同频段内呈现的滞后、超前作用。图6-13式(6-10)对应的波特图四、PID校正器又称比例—积分—微分校正,其传递函数:211()idipcpdiiTKsTKsGsKKsTsTs其作用相应于式(6—7)的滞后—超前校正。注意:校正装置参数的合理选择和系统开环增益的配合调整是非常重要的。例如,若将超前校正环节的参数设置在系统的低频区,就起不到提高稳定裕度的作用。同理若将滞后校正环节的参数设置在中频区,会使系统振荡性增加甚至使系统不稳定。§6-3串联校正的理论设计方法一、串联校正的频率域方法频率域设计的基础是开环对数频率特性曲线与闭环系统品质的关系。在应用时首先需要把对闭环系统提出的性能指标,通过转换关系式,近似地用开环频域指标来表示。例6-4给定系统结构图如图6—14所示。设计()cGs和K使得系统r(t)=t作用下稳态误差≤0.01,相稳定裕度≥045,截止频率40/crads解:令31/cradsK=1000010180(903.1)17.9tg选取相位超前校正:'44/crads10log6a144Ta4a0.01136T校正后开环传递函数为:100(0.045441)()()(0.011361)(0.11)csGsGssss信阳师范学院物理电子工程学院教案自动控制原理第页125校正后相稳定裕度为:049.8,符合要求。图6-15系统的串联超前校正图6-16系统的串联滞后校正二、串联校正的根轨迹方法根轨迹设计的基础是闭环零、极点与系统品质之间的关系。闭环的品质通常是通过闭环主导极点来反映的。因此在设计开始需要把对闭环性能指标的要求,通过转换关系式,近似地用闭环主导极点在复平面上的位置来表示。例6-5设系统的结构图如图6—17所示图6—17系统的结构图要求设计串联超前校正环节,使得系统阶跃响应满足以下要求,超调量0.16调节时间2sts。信阳师范学院物理电子工程学院教案自动控制原理第页126解:030BZOBPO110.35()110.189aTssGsTss图6-18主导极点的选取校正后系统开环传递函数为:5.02(0.351)()()(0.51)(0.1891)csGsGssss图6-19校正后系统的根轨迹例6-6系统结构图如图6-20所示。要求设计滞后校正和调整开环增益,使系统在()rtt作用下的稳态误差0.25rsse,并且阶跃响应的超调量%20%。图6-20例6-6的系统结构图解:作出未加校正时系统的根轨迹,如图6-21所示。根据超调量要求选取系统阻尼比0.5。由原点做060的阻尼线,与根轨迹交于B点。信阳师范学院物理电子工程学院教案自动控制原理第页127图6-21未加校正时系统的根轨迹①根据系统稳态要求选取开环增益。由1rsseK要满足0.25rsse,K应取大于4的值。②确定滞后校正环节的参数b、T。如图6-22所示,在E点右侧取一点作为滞后环节零点的位置。10.2bT(6-19)图6-22选择滞后环节零点1.220.244,5b20.49T。校正环节的传递函数为:4.9981()20.491csGss图6-22选取滞后校正的零点信阳师范学院物理电子工程学院教案自动控制原理第页128③作出校正后的根轨迹图。5(4.9981)()()(20.491)(0.51)(0.1671)14.6(0.2)(2)(6)(0.0488)csGsGssssssssss图6-23校正后的根轨迹图中虚线框部分为原点附近的根轨迹。由图可知,校正后系统满足指标要求。§6-4反馈校正图6-24系统中的局部反馈校正2221GsGsGsHs显然,引进Hs的作用是希望2Gs得到特性使整个闭环系统的品质得到改善。反馈校正的几种作用:1.利用反馈改变局部结构、参数2.利用反馈削弱非线性因素的影响3.反馈可提高对模型扰动的不灵敏性4.利用反馈可以抑制干扰一、利用反馈改变局部结构、参数①用位置反馈包围积分环节。信阳师范学院物理电子工程学院教案自动控制原理第页129KGssfHsK2111fGsKTs1fTKK使系统的无差度下降,相位滞后减少。②用速度反馈包围惯性、积分和放大环节。21KGssTstHsKs1211KGssTs11tTTKK11tKKKK可以增加系统的带宽,有利于快速性的提高。③用速度反馈包围一个小阻尼的二阶振荡环节和放大环节。2222,12nnKGsstHsKs222220.5ntnnnKGssKKs加入速度反馈,增加了阻尼,减弱了小阻尼环节的不利影响。④速度反馈信号再经过一个微分网络1211KGssTs222211ttKTsTsHsKsTsTs1221212211211211111111111tKTsGssTTsTTTKKsKTsKTsTssTsTssTsTsTs1212tTTTTKKT12TTTT二、利用反馈削弱非线性因素的影响最典型的例子是高增益的运算放大器。由1GjGjGjHj若满足1GjHj(6-21)可以保持增益不变,无差度不变;同时提高稳定裕度、抑制噪声、增宽频带。1GjGjGjHjHj(6-22)这表明Gj主要取决于Hj而和Gj无关。若反馈元件的线性度比较好,特性比较稳定,那么反馈结构的线性度也好,特性也比较稳定,正向回路中非线性因素、元件参数不稳定等不利因素均可以削弱。信阳师范学院物理电子工程学院教案自动控制原理第页130三、反馈可提高对模型摄动的不灵敏性摄动是由于模型参数变化或某些不确定因素引起的。采取反馈校正比串联校正对模型的摄动更为不敏感。图6-25串联校正与反馈校正四、利用反馈抑制干扰图6-26利用反馈抑制干扰只要11GH,干扰的影响就可以得到抑制。从而抑制测量噪声的角度,要求高频区1GH。§6-5复合校正对于稳态精度、平稳性和快速性要求都很高的系统,或者受到经常作用的强干扰的系统,除了在主反馈回路内部进行串联校正或局部反馈校正之外,往往还同时采取设置在回路之外的前置校正或干扰补偿校正,这种开式、闭式相结合的校正,称为复合校正。具有复合校正的控制系统称为复合控制系统。一、对控制作用的附加前置校正系统闭环传递函数:11pCsGsGsRsGs图6-27前置校正希望系统输出完全复现控制输入,即令:信阳师范学院物理电子工程学院教案自动控制原理第页1310EsRsCs101pGsGsEsRsCsRsGs1pGsGs101110(),()mmnnnbsbsbNsGsnmDssasasa21210cGsdsdsd根据误差定义,可以求出误差传递函数121110210000nnmnmnmmmsasasadsdsdbsbEsRssabsab
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 qw5558912
qw5558912
本文标题:自动控制原理第6章
链接地址:https://www.777doc.com/doc-4431608 .html