您好,欢迎访问三七文档
当前位置:首页 > 生活休闲 > 科普知识 > 消防机器人通用技术条件
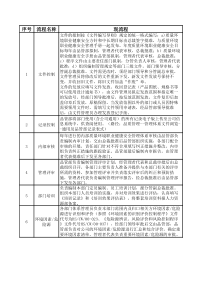
实用文档标准文案前言本部分的第4、5、6、9章为强制性,其余为推荐性。GAXX《消防机器人》目前拟分为9个部分:一一第1部分:消防机器人通用技术条件;一一第2部分:消防灭火机器人:一一第3部分:消防侦察机器人;一一第4部分:消防排烟机器人;一一第5部分:消防救援机器人;一一第6部分:消防洗消机器人;一一第7部分:消防照明机器人;一一第8部分:防暴机器人;一一第9部分:排爆机器人:本部分为GAXX的第1部分。根据国内目前消防机器人的生产、使用情况以及今后较长时期内我国消防机器人的发展规划,编制了本部分标准。本部分标准首次发布。本部分由中华人民共和国公安部提出。本部分由全国消防标准化技术委员会第四分技术委员会(SAC/TCll3/SC4)归口。本部分负责起草单位:公安部上海消防研究所。本部分主要起草人实用文档标准文案消防机器人通用技术条件GeneralspecificationforfirerobotGAXX.-XXXX1范围本标准规定了消防机器人的术语、分类、型号编制、功能、性能要求、试验方法、检验规则、标志、包装、运输、贮存等。本标准适用于在陆地上行走的各类消防机器人,不适用于在空中或水面、水下等执行消防作业的其它特种机器人。2规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。GB/T156—2007标准电压GB/T191—2008包装储运图示标志GB/T699—1999优质碳素结构钢GB/T1173—1995铸造铝合金GB/T1176—1987铸造铜合金技术条件GB/T1348—1988球墨铸铁件GB/T3766—2001液压系统通用技术条件GB3836.1—2000爆炸性气体环境用电器设备第一部分:通用要求GB4208—2007外壳防护等级(1P代码)GB/T4237—2007不锈钢热轧钢板和钢带GB5083—1999生产设备安全卫生设计总则GB/T7251.8—2005低压成套开关设备和控制设备智能型成套设备通用技术要求GB7258—2004机动车运行安全技术条件GB/T7932—2003气动系统通用技术条件GB/T9439—1998灰铸铁件GB12325—2003电能质量供电电压允许偏差GB14097—1999中小功率柴油机噪声限值GB15540—2006陆地移动通信设备电磁兼容技术要求和测量方法GB17478—2004低压直流电源设备的性能特性GB18296—2001汽车燃油箱安全性能要求和试验方法GB20891—2007非道路移动机械用柴油机排气污染物排放限值及测量方法(中国I、II阶段)GB50171—1992电气装置安装工程盘、柜及二次回路结线施工及验收规范GB50257—1996电气装置安装工程爆炸和火灾危险环境电气装置施工及验收规范GB/T13384—1992机电产品包装通用技术条件JB/T9773.2—1999柴油机起动性能试验方法3术语下列术语适用于本标准:3.1消防机器人firerobot实用文档标准文案由移动载体、控制装置、自保护装置和机载设备等系统组件组成的具有人工、半自主或自主控制功能,可替代消防员从事特定消防作业的移动式机器人。3.2移动载体movingcarrier由动力源、传动机构、行走机构、机架等组成,用于完成消防机器人的行走和承载功能的组件。3.3复合式行走机构compoundmovingmechanism由两种或两种以上型式复合组成的行走机构,如关节轮式、关节履带式等。3.4消防机器人后方辅助系统assistancesystemforfirerobot与消防机器人配套使用的后方控制系统和运载车辆等辅助设备。3.5机载设备on-boardequipment安装在移动载体上的用于执行灭火、侦察、排烟、救援、洗消、照明、防暴、排爆等特定任务的装置,如消防炮、气体探测仪、排烟机、机械手、照明灯具等。4消防机器人分类4.1按行走机构型式可分为:(1)轮式(2)履带式(3)复合式(4)其它型式4.2按控制方式可分为:(1)人工控制(2)半自主控制(3)自主控制4.3按机载设备主体功能可分为:(1)灭火(2)侦察(3)排烟(4)救援(5)洗消(6)照明(7)防暴(8)排爆(9)其它5型号编制5.1构成和编制消防机器人的产品型号由类别代号、分类代号、主参数代号、行走机构特征代号、企业自定代号等组成。型号编制方法如下:5.2类别代号位于产品型号的第一部分,用三个汉语拼音字母表示,前二个汉语拼音“Rx”表示消防机器人,第三个汉语拼音表示该机器人的控制方式,控制方式代号见表1。表1控制方式代号序号控制方式代号1人工R2半自动B3自主Z实用文档标准文案5.3分类代号位于产品型号的第二部分,用一至三个汉语拼音字母表示,若该产品仅有单一功能,则用一个汉语拼音字母表示,若有两种或两种以上复合功能,则以最常用的前二或三种功能为依据,用二或三个汉语拼音表示,其含义见表2。字母排列规则为主要功能排列在第一位,其余功能的字母排序,按表2的顺序排列。5.4主参数代号位于产品型号的第三部分,其含义见表2。若有两种或两种以上的复合功能,则列出主要功能的主参数代号。表2分类代号和主参数代号序号名称分类代号消防装备主参数代号含义代号单位1消防灭火机器人M喷射装置流量L/s或kg/s2消防侦察机器人C探测参数数量个(种)3消防排烟机器人Y排烟装置额定风量M3/h4消防救援机器人J机械手额定载荷kg5消防洗消机器人H洗消液装载量kg6消防照明机器人Z额定照明功率kW7防暴机器人F驱暴设备配备数台8排爆机器人P排爆设备配备数台9其它消防机器人Q5.5行走机构特征代号位于产品型号的第四部分,本代号用一至二个汉语拼音字母表示,其含义见表3。表3行走机构代号序号行走机构形式代号1轮式L2履带式D3关节轮式GL4关节履带式GD5其它Q5.6企业自定代号位于产品型号的最后部分,在前面的符号不能区别时才能使用,以汉语拼音字母和阿拉伯数字表示,位数由企业自定。当第一位是汉语拼音字母B时,表示该产品具有防爆性能。5.7产品型号示例示例1:一种人工控制的消防灭火机器人,轮式行走机构,消防炮流量32L/s、其型号为:实用文档标准文案示例2:一种半自主控制的消防侦察机器人,可探测4种气体、关节轮式行走机构,防爆型、为第二次改进设计,其型号为:示例3:一种人工控制的,以救援为主,侦察为辅的消防救援、侦察机器人,机械臂额定载荷80kg,履带式行走机构,其型号为:示例4:一种人工控制的以灭火为主,侦察和照明为辅的消防灭火、侦察、照明机器人,消防炮流量32L/s,履带式行走机构,其型号为:6功能6.1功能配置消防机器人的功能配置应满足表4的要求。表4各类消防机器人功能要求机器人功能灭火机器人侦察机器人救援机器人排烟机器人洗消机器人照明机器人防暴机器人排爆机器人控制▲▲▲▲▲▲▲▲行走▲▲▲▲▲▲▲▲灭火▲自保护冷却▲防倾覆▲▲▲▲▲▲▲▲防碰撞▲抗暴▲气体探测▲实用文档标准文案视频信息采集▲▲▲▲音频信息采集▲▲▲▲环境参数采集▲防爆▲信息双向传输▲▲▲▲冗余通信▲▲机械手作业▲▲排烟▲洗消▲供电▲照明▲驱暴▲排爆▲声光报警▲▲▲▲▲▲注:▲为必配功能6.2功能要求6.2.1控制功能应确保消防人员在灾害现场对消防机器人的行走或消防作业能进行可靠控制。6.2.2行走功能应满足消防机器人在灾害现场实现直行、转弯、爬坡、越障等要求。6.2.3灭火功能应满足喷射灭火剂扑救火灾的要求。6.2.4自保护功能(1)冷却功能应满足消防机器人在高温、强热辐射环境下能靠近火源并实施灭火作业的要求。(2)防倾覆功能应满足消防机器人在不大于其工作坡度的环境条件下行走或实施消防作业的要求。(3)防碰撞功能应满足消防机器人在行走或消防作业过程中避免与障碍物相撞,造成损坏的要求。(4)抗暴功能应满足消防机器人在作业时具有防接近、防烧、防砸等自卫能力。6.2.5气体探测功能应满足消防机器人在灾害现场准确探测有毒、有害、易燃、易爆气体种类、及其浓度和变化趋势,并将探测结果实时传输到后方控制系统中的要求。6.2.6视频信息采集功能应满足消防机器人采集消防机器人周围或其本体动作姿态视频信息的要求。6.2.7音频信息采集功能应满足消防机器人采集其周围音频信息的要求。6.2.8环境参数采集功能应满足消防机器人采集温度、湿度、辐射热强度、风速、风向等环境参数的要求。6.2.9防爆功能应满足消防机器人在进入可能存在易燃、易爆气体的危险场所时,具有相应防爆等级的要求。6.2.10信息传输功能应满足消防机器人与后方控制台能进行可靠信息交互的要求。6.2.11冗余通信功能应满足消防机器人与后方控制台间具有两种或两种以上的多通道冗余通信方式的要求。6.2.12机械手作业功能应满足消防机器人能执行人员或重要物品转输、阀门启闭、破拆等作业的要求。6.2.13排烟功能应满足消防机器人能执行水雾冷却灭火、排烟等作业的要求。6.2.14洗消功能应满足消防机器人能执行清洗、消毒、稀释等作业的要求。实用文档标准文案6.2.15供电功能应满足消防机器人能为各类移动式电动消防设备就近提供电源的要求。6.2.16照明功能应满足消防机器人能为灾害现场需要进行消防作业的区域提供一定照度的要求。6.2.17驱暴功能应满足消防机器人能执行音频警示、威慑、释放各类驱暴介质等作业的要求。6.2.18排爆功能应满足消防机器人能执行现场可疑物侦检、处置、转输、摧毁等作业的要求。6.2.19声光报警功能应满足消防机器人在灾害现场作业时能提供声、光警示信号的要求。7性能要求:7.1外观质量要求7.1.1铸件表面应光洁,不允许有砂眼、夹砂、气孔、疏松、裂纹、结疤等有损强度和外观质量的缺陷。7.1.2应采用耐腐蚀材料制造,或将材料进行防腐蚀处理,使其表面不受水、大气及灭火剂等的侵蚀。7.1.3漆皮表面应光洁、不应有漏漆、起皮、脱落等缺陷。7.1.4镀层表面色泽应均匀、不应有烧黑、鼓泡、剥落、锈浊、露底、毛刺或划伤。7.1.5塑料件表面色泽应均匀,无明显划伤、飞边、凹凸不平。7.1.6焊接结构件焊缝应平整、均匀,不应有漏焊、虚焊、夹渣、裂纹、气孔及飞溅物等缺陷。7.2零部件通用性能要求7.2.1铸件材料的机械性能及化学成份应符合GB/T1173、GB/T1176、GB/T1348、GB/T9439中有关规定。7.2.2金属材料应符合GB/T4237、GB/T699等有关标准的规定。7.2.3加工完毕的零部件表面应进行防锈蚀处理,包括涂防锈漆或防锈油。7.2.4装配前各零件应清洗干净,装配应牢固可靠,在转动部位应涂以润滑脂。7.2.5具有输送、喷射灭火剂功能的承压管路按8.2.2的规定进行水压密封性能试验后,各连接部位应无渗漏现象。7.2.6耐压零部件(压力容器除外)按8.2.3的规定进行水压强度试验后,零部件不应有渗漏、裂纹及永久变形等缺陷。7.2.7借助外壳防护的电器设备的防护等级应符合GB4208的相关规定。7.2.8内燃机排气管及燃油箱要求(1)内燃机排气管出口设置应符合GB7258中12.7.4的相关规定。(2)燃油箱的安全性能应符合GB18296中第3条的规定。7.2.9液压系统性能应符合GB/T3766中1.2、1.3、1.4、1.7.2及6.1的规定。7.2.10气动系统性能应符合GB/T7932中4.3、4.4、4.5、5.3.2及10.2.2的规定。7.2.11电动机及供电电源(1)电动机应装有短路和过载保护装置,能正常启动和连续工作。(2)电动机的供电电压,应优先选GB156的规定值,其交流供电电源偏差(电压、频率)或直流供电电源电压偏差应符合GBl2325的规定。安全及抗干扰性能符合GBl7478中4、5的相关规定。7.2.12无线通信装置的电磁兼容性应符合GBl5540中5、7的相关规定。7.2.13控制装置
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 mrlouis
mrlouis
本文标题:消防机器人通用技术条件
链接地址:https://www.777doc.com/doc-5436808 .html